Resource sensors
![]()
Sensors
Sensors are components, usually electrical components, that can detect or measure process variables. The output of a sensor is a signal.
The software supports the following sensor types.
![]()
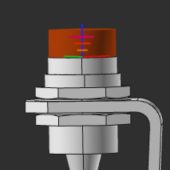
A proximity sensor can detect the presence of an object without physical contact with that object.
In the 3D View the proximity sensor is graphically represented by an object according the image below.

The cylinder of the sensor object displays the true dimensions of the detection area, or collision area, of the sensor.
A proximity sensor has the following attributes:
| Attribute | Description | Remark |
|---|---|---|
| Name | The name of the proximity sensor. | A blank name is allowed. |
| Port type | The port type of the sensor, i.e. the switch behavior at detection. | The sensor supports two types: |
| Switching diameter | The diameter of the sensor detection area. | |
| Switching distance | The height of the sensor detection area. | |
| X, Y, Z | The X,Y and Z coordinates of the sensor. | Coordinates are set to the component’s global coordinate system. |
| Roll(X), Pitch(Y), Yaw(Z) | The roll, pitch and yaw orientation of the sensor. | Orientation angles are set to the component’s global coordinate system. |
| Defines which classes of components the sensor can detect. Selection through the corresponding class icon. | The Reset command switches the definition back to the base setup. | |
| The class workpieces. | ||
The resource classes.  | Picking the category icon sets all components of the category. | |
| The class humans. |
![]()
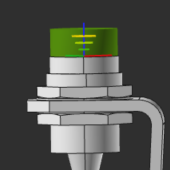
A light barrier sensor can detect the presence of an object without physical contact with that object.
In the 3D View the light barrier sensor is graphically represented by an object according the image below.
The cylinder of the sensor object displays the true dimensions of the detection area, or collision area, of the sensor.
A light barrier sensor has the following attributes:
| Attribute | Description | Remark |
|---|---|---|
| Name | The name of the proximity sensor. | A blank name is allowed. |
| Port type | The port type of the sensor, i.e. the switch behavior at detection. | The sensor supports two types: |
| Switching diameter | The diameter of the sensor detection area. | |
| Switching distance | The height of the sensor detection area. | |
| X, Y, Z | The X,Y and Z coordinates of the sensor. | Coordinates are set to the component’s global coordinate system. |
| Roll(X), Pitch(Y), Yaw(Z) | The roll, pitch and yaw orientation of the sensor. | Orientation angles are set to the component’s global coordinate system. |
| Defines which classes of components the sensor can detect. Selection through the corresponding class icon. | The Reset command switches the definition back to the base setup. | |
| The class workpieces. | ||
| The resource classes. | Picking the category icon sets all components of the category. | |
| The class humans. |
Sensor signal port
The port type of the sensor defines the behavior at detection by the sensor.
During simulation, the state switch of the sensor is visualized with changing the color of the sensor object.
 |  |