Teach
![]()
Dashboard
The Teach command opens the teach dashboard.The motion of the tool center point (TCP) of the resource along the tool path can be manipulated with use of this dashboard.
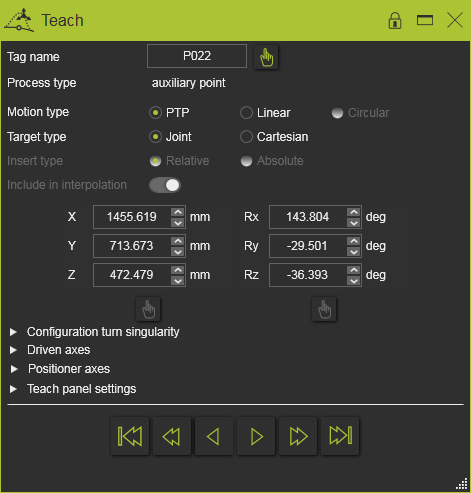
Target position
This section of the dashboards displays the information of the selected toolpath element, the toolpath target position.
| Tag name | Name of the tag. The name can be modified here. |
| Process type | The type of the tag, globally divided in off-process, in-process and auxiliary points. |
| Motion type | The motion to move to the tag: PTP Linear Circular. |
| Target type | The target of the tag; i..e to define the position over: Joint values Cartesian coordinates. |
![]()
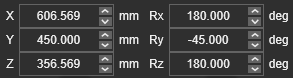
Some parameters have a hand symbol attached. When the parameter has been changed this symbol turns activated to indicate the modification, like in the example below:
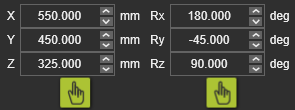
Pressing the activated hand symbol will reset the parameter back to its original computed value.
The Cartesian coordinates of the target are displayed below the type indication. By default these coordinates are generated while computing the toolpath or inserting auxiliary tags.
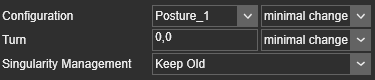
Configuration
In this block the resource configuration information is displayed and can be modified. As in the example below. It includes, depending on the type of the resource, its configuration, its turn state and singularity management.
Driven axis
In this block the driven axes of the robot or machine are displayed. The resource can be taught over these individual axes with moving the slider or by entering a value in the parameter field.
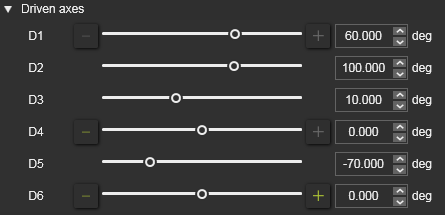
When the driven axis shows a
![]()
or
![]()
button, it means that its value can be increased or decreased by one turn by simply pressing the button.
External axis
In this block the teachable axes of external resources, like a workpiece positioner or robot rail, are listed. Their values can be modified in the same way as for the driven axis.

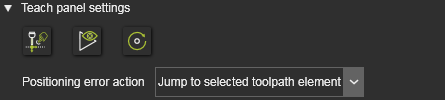
Teach settings
Some dedicated settings are available for teaching. Some of them are also present in the OLP container of the General settings. For convenience they are listed her as well.
| Keep TCP | Activated = The tool center point follows the change of taught external axes. De-activated = The tool center point remains at its original position while an external axis is being taught. |
| Positioning modes in teach | Activated = Simulation based positioning. A background simulation of all programs runs to define the positions of all incorporated robot or machines at simulation time. In case of an issue during simulation, it has to be decided how to proceed. The action is defined here. De-activated = Joint value positioning. While teaching, the tool center point’s position is defined over the joint values of its resource. This is only done in the active program. |
| Apply toolpath modification | Activated = Changes made in the 3D View or in this panel are dynamically applied and the toolpath is recalculated automatically. De-activated = Changes require a manual confirmation to recompute the toolpath. |
| Simulate to the issue | The simulation stops at the (first) incident position and the TCP is placed there to highlight and focus on the problem. |
| Jump to selected toolpath element | The simulation is terminated and the TCP is placed at the selected position by applying the joint values. |
Navigation
Picking a TPE in the 3D View will show its information in the Teach dashboard. But instead of selecting each TPE in the 3D View, the navigator at the bottom of the dashboard enables to step through the toolpath with simple mouse clicks.

| Next | Steps to the next tag in the toolpath. | |
| Previous | Steps to the previous tag in the toolpath. | |
| Operation end | Jumps to the last tag of the operation. | |
| Operation start | Jumps to the first tag of the operation. | |
| Next operation group | Jumps to the first tag of the next operation group. | |
| Previous operation group | Jumps to the first tag of the previous operation group. |
The Teach dashboard can only be opened when the Events and teach command in the Function toolbar has been activated.