Undriven kinematic systems
Undriven kinematic systems
With the undriven joint sub systems can be built to generate a more realistic kinematic simulation of the resource. However this is not an infinite and is limited to a series of possible sub systems that FASTSUITE Edition 2 supports and that are built with certain design rules. For all sub systems the main rule is that they are created within an existing kinematic skeleton, thus not between two kinematic skeletons, and that the start and end of the sub system is a driven joint.
| System | Kinematic definition | Design rule | |
|---|---|---|---|
| Cardan | rotation joint rotation joint | The first joint is perpendicular to the second joint The joint axis must intersect | |
| Suspension TRR | translation joint rotation joint rotation joint | All rotation axes must be parallel The translation axis must be orthogonal to the rotational axes The translation axis must be parallel to one of the axes, but not the same, of the parent joint | 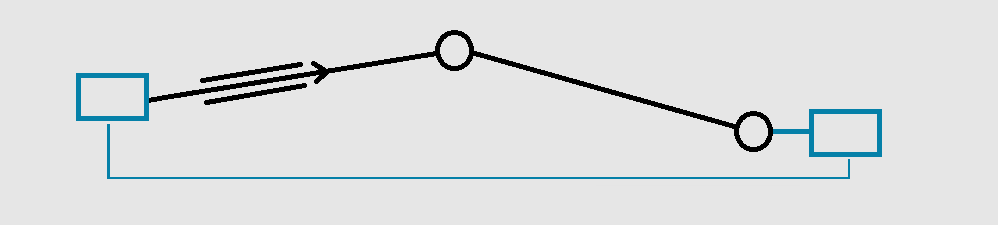 |
| Suspension RTR | rotation joint translation joint rotation joint | All rotation axes must be parallel The translation axis must be orthogonal to the rotational axes The translation axis lies directly in between the first and second rotational axes | 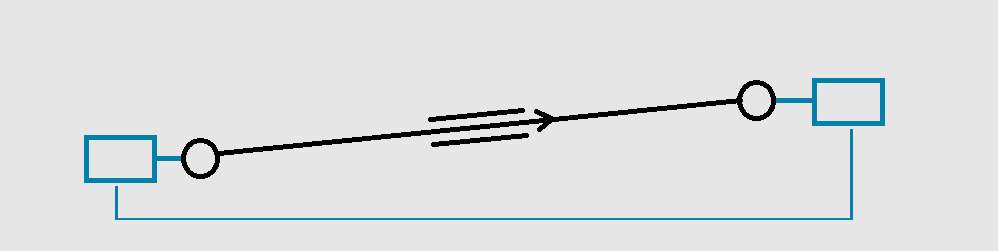 |
| Suspension RoTR | rotation joint translation joint rotation joint | All rotation axes must be parallel The translation axis must be orthogonal to the rotational axes The translation axis does not point directly to the first rotational axis | 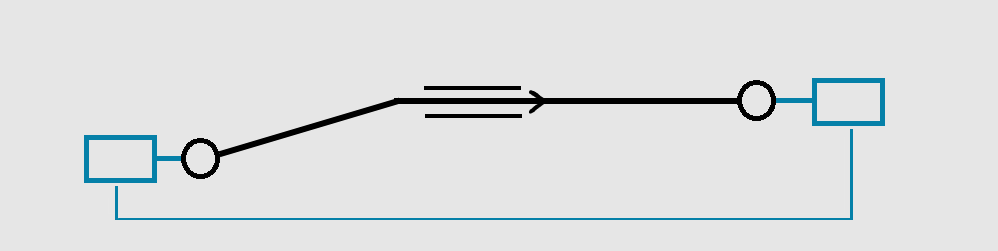 |
| Suspension RToR | rotation joint translation joint rotation joint | All rotation axes must be parallel The translation axis must be orthogonal to the rotational axes The translation axis does not point directly to the second rotational axis | 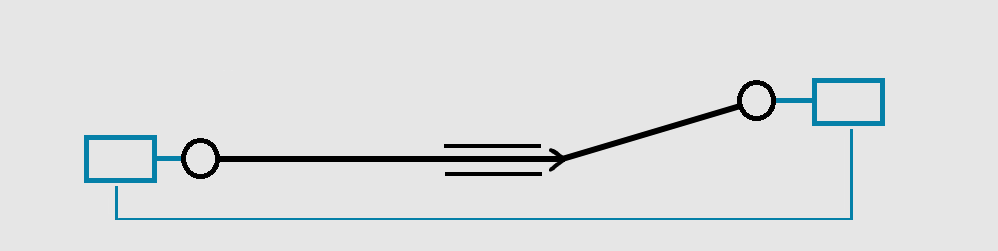 |
| Suspension RRT | rotation joint rotation joint translation joint | All rotation axes must be parallel The translation axis must be orthogonal to the rotational axes The translation axis must be parallel to one of the axes, but not the same, of the parent joint | 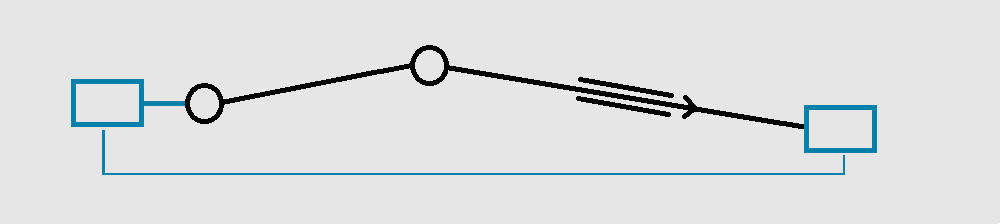 |
| Linkage gearing | rotation joint rotation joint rotation joint | All the three rotation axes must be parallel All three joint positions must be different All three joints are not to lie in line, not in design, nor while moving |  |
More kinematic reference information
Was this page helpful?