Kinematic skeleton
![]()
\
Kinematic skeleton
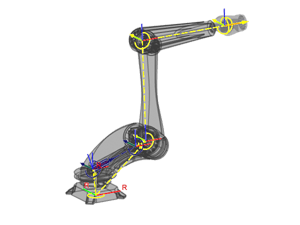
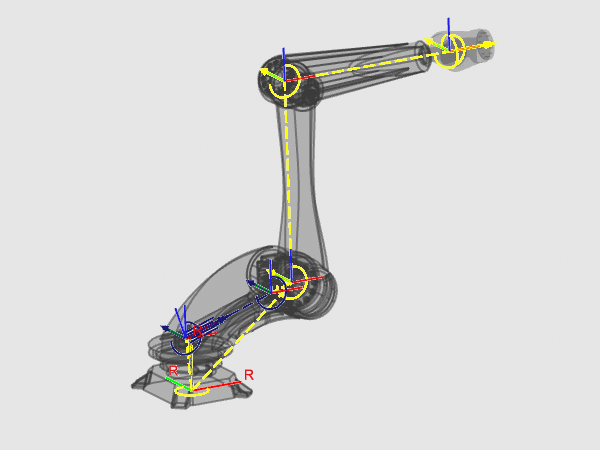
The dynamic capability of a resource is defined by its kinematic skeleton. This kinematic skeleton is a series of interconnected joints forming a chain that controls the motion of (parts of) the resource.
A joint is a frame, a coordinate system, with several predefined motion properties.
| Property | Description |
|---|---|
| Coordinates | The position and orientation of the joint. |
| Axis | The axis of the coordinate system to which the joint refers. |
| Type | The type of joint: |
| Parent | The parent joint or root frame to define the dependency in the kinematic skeleton. |
| Limits | The maximum and minimum values of the joint movement. |
| Max. velocity | The maximum velocity of the joint movement. |
| Max. acceleration/deceleration | The maximum acceleration or deceleration of the joint movement. |
| Connect undriven joint | The rigid connection of an undriven joint to the parent driven joint. |
The root of a kinematic skeleton is set by the root frame of the resource. This root frame is associated to the fixed part of the resource, from which all (relative) motions are derived.
During simulation, the exact values of the driven joints within a kinematic skeleton are set by the controller that is connected to the resource.
Kinematic skeleton interactions
More kinematics reference information
Was this page helpful?