3-Punkt-Kalibrierung
![]()
Kalibrierung
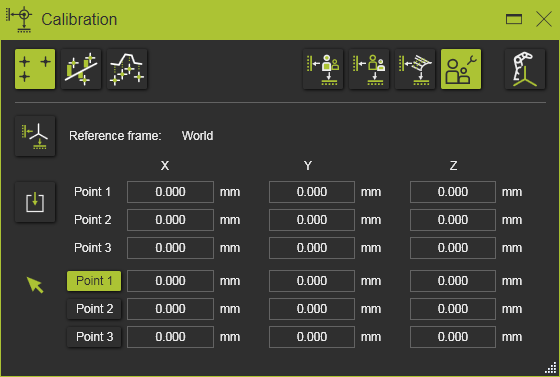
Die Dreipunktkalibrierung wird verwendet, um ein Werkstück oder eine Ressource, z. B. eine Vorrichtung, in der virtuellen Arbeitszelle korrekt zu positionieren. Die Kalibrierung basiert auf einer exakten mathematischen Methode, bei der 3 statische Punkte auf der Komponente vorhanden sind, die am realen Teil gemessen und am entsprechenden virtuellen Teil ausgewählt werden können. Die Methode bringt die beiden Punktgruppen in Kongruenz und bewegt somit die Komponente mit.
Bezugssystem
![]()
Die Reference frame-Taste ist eine Option, um das Referenzkoordinatensystem (Kalibrierungsbezugsrahmen) anzugeben, in dem die gemessenen Punkte importiert werden. Standardmäßig wird das World-Koordinatensystem verwendet.
Import
![]()
Die Eingabe für die Kalibrierung ist ein Satz von drei gemessenen Koordinaten. Diese Koordinaten werden üblicherweise aus einer externen Datei importiert, aber das manuelle Eingeben oder Ändern dieser Werte ist möglich.
Die Eingabedatei mit den gemessenen Punkten ist eine einfache Textdatei, die Zeile für Zeile gelesen wird. Es gibt optional eine erste Zeile mit dem Einheitsindikator, gefolgt von drei Koordinatenzeilen. Koordinatenlinien müssen genau drei Koordinatenwerte enthalten, die durch Semikolon getrennt sind. Jede Linie wird als die X-, Y- und Z-Koordinaten eines einzelnen Punktes interpretiert. Standardmäßig werden diese Punkte im 3D-Weltkoordinatensystem importiert, aber ein anderes Referenzkoordinatensystem kann im Dashboard definiert werden. Ein Beispiel für eine solche Importdatei ist unten gezeigt.
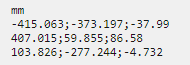
Die Einheit der Koordinaten wird in der ersten Zeile der Datei angegeben. Jede von der Software bekannte Einheit kann hier angewendet werden. Sie kann im vollen Namen oder als Standardabkürzung dieser Einheit geschrieben werden. Wenn jedoch die Einheitszeile in der Datei fehlt, liest der Import die Koordinaten mit der Standardeinheit des Systems aus.
Das Dezimalzeichen der Koordinate ist unabhängig von Sprach- und Regionseinstellungen. Es muss immer ein Punkt ”.” sein.
Obwohl die Einheit in der Importdatei angegeben wurde, zeigt das Dashboard die Koordinaten entsprechend den aktuellen Systemeinheiten an. Die Werte werden dann bei Bedarf umgewandelt.
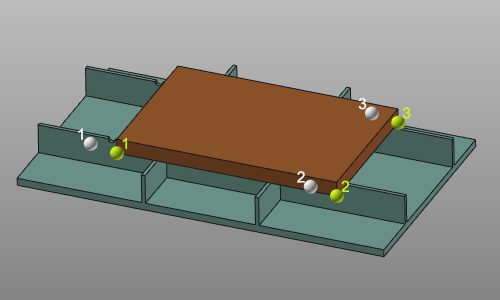
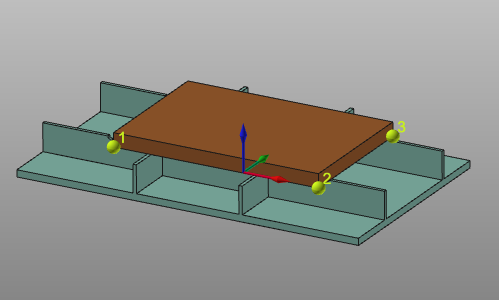
Mit der Import-Taste werden die gemessenen Daten der Position des Objekts in der realen Arbeitszelle ausgelesen. Ein Dateibrowser erscheint, um die Datendatei auszuwählen. Die gemessenen Koordinaten werden im 3D-Raum als weiße Kugeln dargestellt. Diese Standardfarbe kann im Settings geändert werden.
Das Ergebnis des Imports wird im Referenzbereich des Dashboards angezeigt. Die Koordinatenwerte der gemessenen Positionen können hier bei Bedarf angepasst werden.

Ausgewählte Punkte
![]()
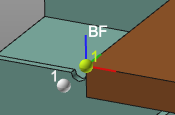
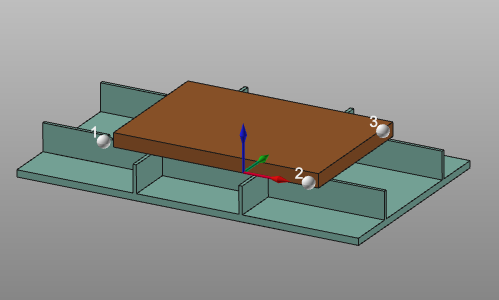
Hier werden die ausgewählten Punkte der Komponente angezeigt. Diese Kalibrierungspunkte können direkt auf dem Werkstück oder der Ressource ausgewählt werden. Sie werden als grüne Kugeln dargestellt. Diese Standardfarbe kann im Settings geändert werden.
Jederzeit kann ein Punkt aktiviert werden, indem man die 3D-Darstellung auswählt oder auf das Element im Dashboard klickt. Dann kann ein neuer Punkt ausgewählt oder seine Koordinaten im Dashboard verändert werden.

Berechnen
Das Kalibrierungsergebnis wird unmittelbar nach Abschluss aller Schritte berechnet.
Das Armaturenbrett bleibt jedoch offen. Es erlaubt es, alles am Eingang zu ändern und die Kalibrierung spontan neu zu berechnen. Das Schließen des Dashboards oder das Starten eines anderen Befehls beendet die Kalibrierung mit der zuletzt berechneten Lösung.
Kalibrierungsergebnisoption
Das Ergebnis der Kalibrierung ist eine Transformation der Komponente. Die Art und Weise, wie es angewendet wird, kann in den Ergebnisoptionen definiert werden.
| Anfangssituation. | 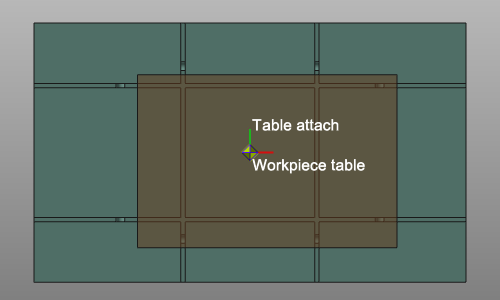 | ||
| Erstellen Sie einen neuen Kinderadapter | Im Root der kalibrierten Komponente wird ein neuer mechanischer Kinderadapter erstellt; CalibPlug. Die Komponente selbst wird nicht transformiert. Der neue Adapter kann verwendet werden, um das Bauteil entsprechend den Kalibrierungskoordinaten neu zu positionieren. | 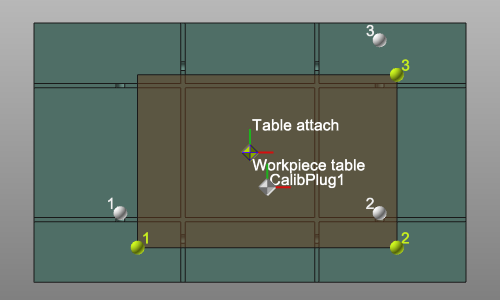 | |
| Für die folgenden Ergebnisoptionen muss die Komponente an eine andere angeschlossen werden; Zum Beispiel ein Werkstück auf einem Tisch. Der Kinderadapter der zu kalibrierenden Komponente wurde mit dem Elternadapter der anderen Komponente verbunden. | |||
| Definiere die Transformation | Das Bauteil wird in die kalibrierte Position gebracht, aber die Adapter werden nicht ausgetauscht. Zwischen den beiden verbundenen Komponenten gibt es einen Versatz. Eine Verbindungsleitung zwischen den beiden Adaptern wird angezeigt. | 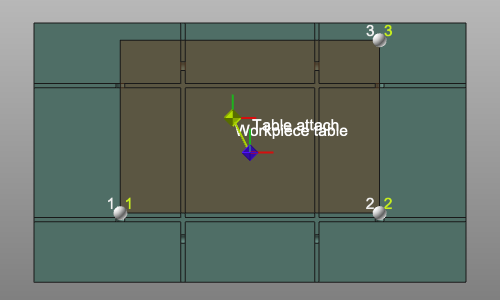 | |
| Verschiebe den Kinderadapter | Die Komponente wird in die kalibrierte Position gebracht. Sein Kinderadapter wird zusammen mit der Transformation bewegt. Dies führt zu einer Änderung der Komponentendefinition. Deshalb muss es erneut gerettet werden. | 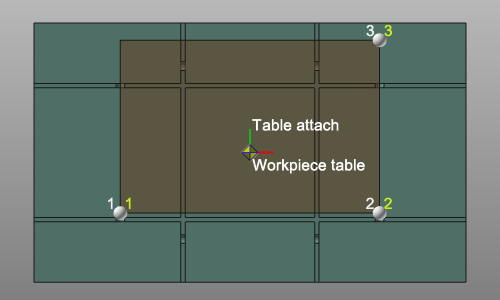 | |
| Verschieben Sie den Elternadapter | Die Komponente wird in die kalibrierte Position gebracht. Der Elternadapter der verbundenen Komponente wird zusammen mit der Transformation bewegt. Dies erzeugt eine Änderung der Definition dieser verbundenen Komponente. Deshalb muss es erneut gerettet werden. | 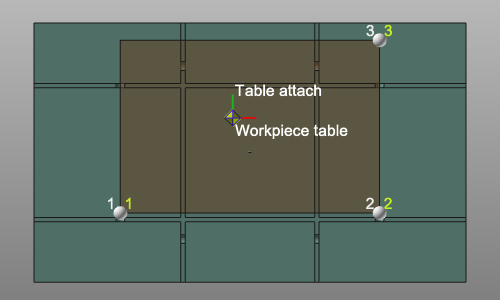 |
![]()
Die Create base frame Option ist ein Schalter, um am zuerst ausgewählten Punkt einen zusätzlichen Basisframe zu erstellen.