Interactive simulation mode
![]()
The Interactive simulation mode enables the user the interactive motion and positioning of a kinematic object in the 3D View.
With the teach manipulator a kinematic resource can be simulated up to its limits.
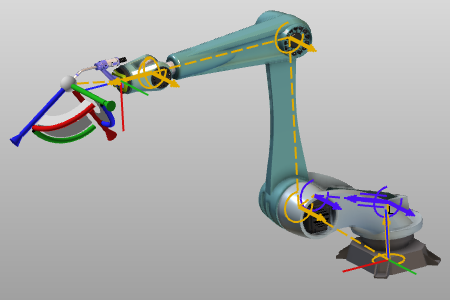 | 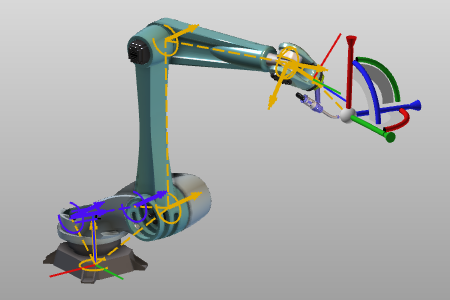 |
Picking a driven (synchronous) joint of the kinematic chain enables to move that joint up to its limits.
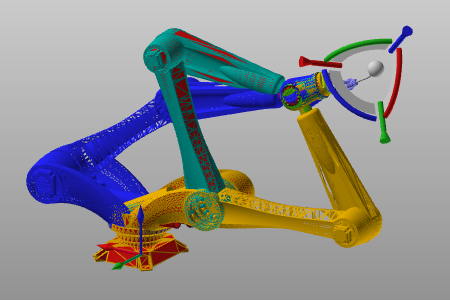
A double click on the center sphere of the manipulator will show all the possible configurations of the resource in that teach position.
In the 3D View the interactive Pie menu opens:

More interactive simulation information
Was this page helpful?