Interaktive Simulation
![]()
Gemeinsame Bewegung
Dies ist eine sehr praktische Funktion, um ein kinematisches Objekt nur mit der Maus zu manipulieren. Wenn der Modus aktiviert ist, zeigt die 3D-Ansicht nur die Ressource mit ihrem Gelenkskelett und Verbindungen zwischen ihnen. Joint-Rahmen und -namen werden automatisch versteckt.
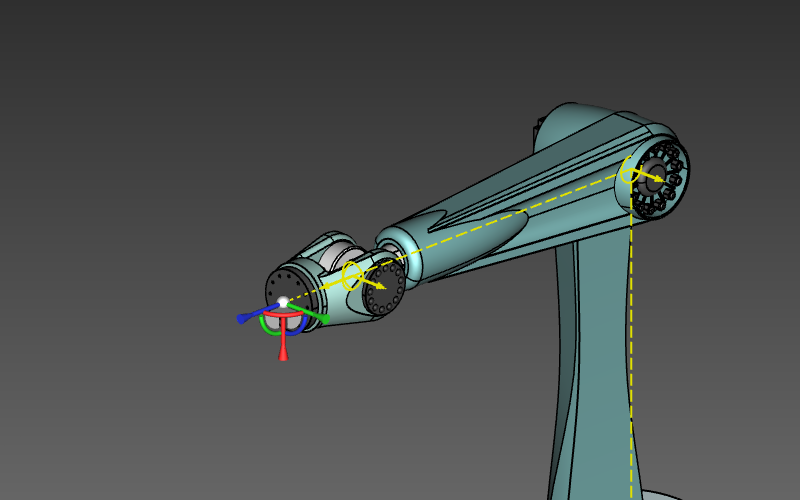
Jedes angetriebene Gelenk oder die angeschlossene Geometrie kann mit der linken Maustaste ausgewählt werden. Die Verbindung wird aktiv und ihre grafische Darstellung zeigt ein farbiges Symbol, das die Grenzen und die lokale Bewegungsposition dieses Gelenks darstellt. Während du weiter die linke Maustaste drückst und ziehst, bewegt sich die angehängte Geometrie. Obwohl das untenstehende Bild nur das rotierende Gelenk zeigt, gilt die Mausinteraktion auch für translationale Gelenke.
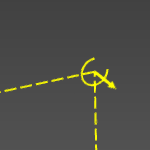 |  | |
| Standard | Interagierte |
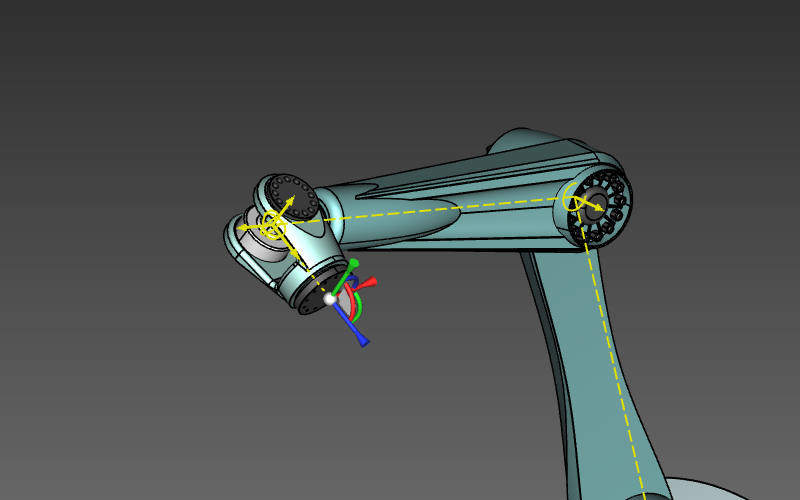
Beim Wechselwirken eines Gelenks, das Teil einer kinematischen Kette ist, bewegen sich alle anderen Gelenke, die stromabwärts (Kinder) zum interagierenden Gelenk verbunden sind, mit der Manipulation mit. Nur, und natürlich, ihre relativen Positionen (Lage und Winkel) werden sich während dieser Manipulation nicht ändern.
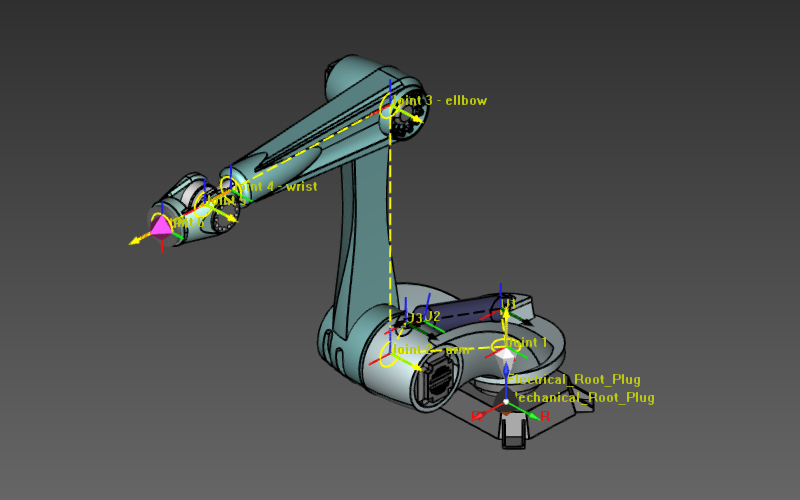 |  | |
| Vor | Nach |
Inverse kinematische
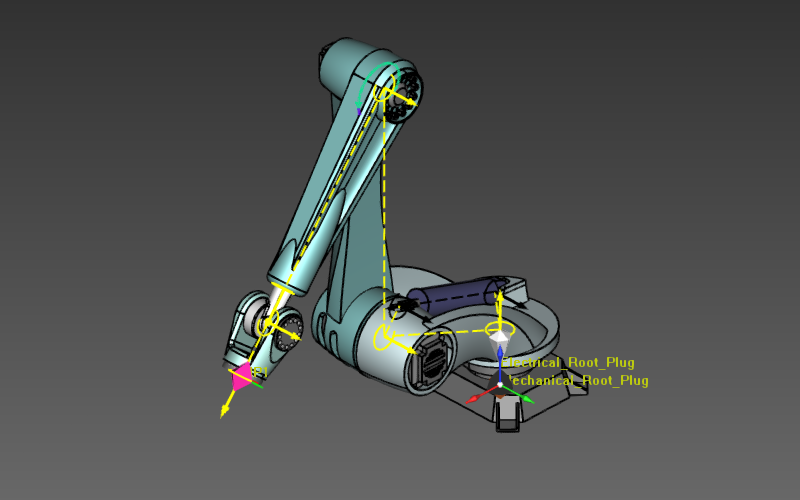
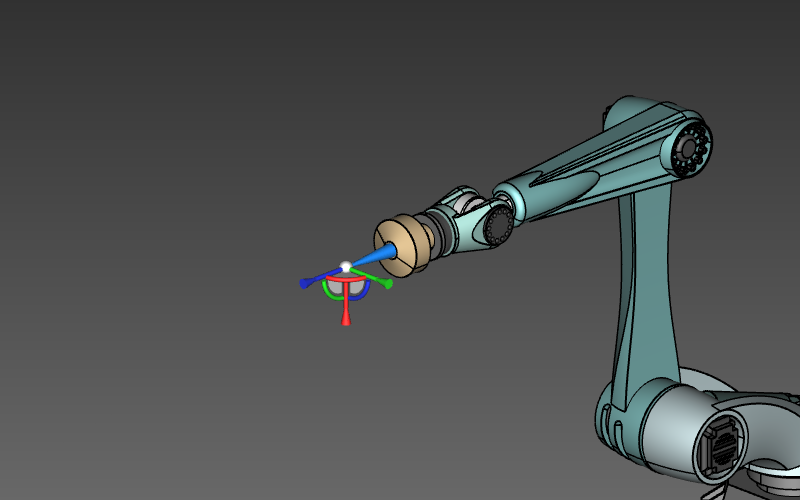
Wenn die Ressource mit einem Werkzeugrahmen ausgestattet ist, ist es möglich, die Ressource mithilfe der inversen kinematischen Berechnung zu simulieren. Der interaktive Werkzeugrahmen-Manipulator wird sichtbar und kann ähnlich wie der 3D-Manipulator an eine gewünschte Position in der 3D-Ansicht gezogen (übersetzt und gedreht) werden. Kein einzelnes Gelenk wird manipuliert, sondern basierend auf Position und Winkel des Werkzeugrahmens werden alle inneren Positionen und Winkel der Verbindungen berechnet.
 |  | |
| Vor | Nach |
![]()
Es ist möglich, den Werkzeugrahmenmanipulator an eine Position oder einen Winkel zu ziehen, der außerhalb des Bereichs der kinematischen Kette liegt. In einem solchen Fall bleibt die Ressource selbst an ihrer Grenzposition stehen, wo der Werkzeugrahmenmanipulator weiter gezogen werden kann. Zwischen dieser Grenzposition und der Position des Manipulators wird ein Strahlsymbol angezeigt, um die Bewegung außerhalb des Reichweitenbereichs anzuzeigen.
 | 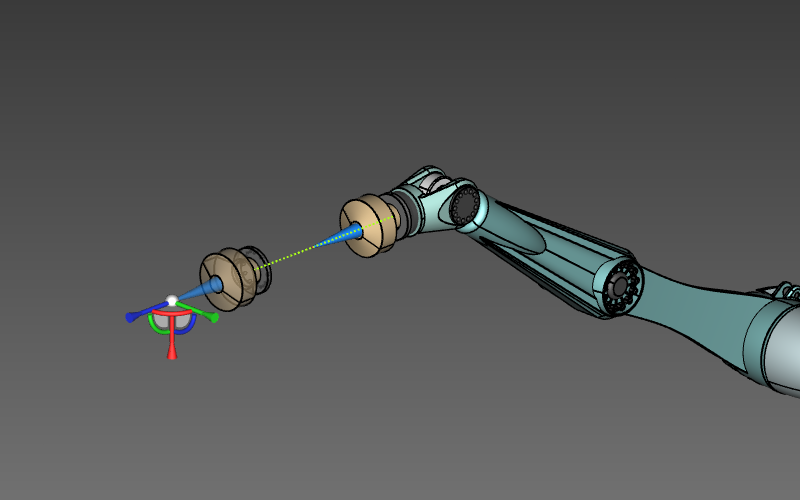 | |
| Innen Reichweite | Außerhalb der Reichweite |
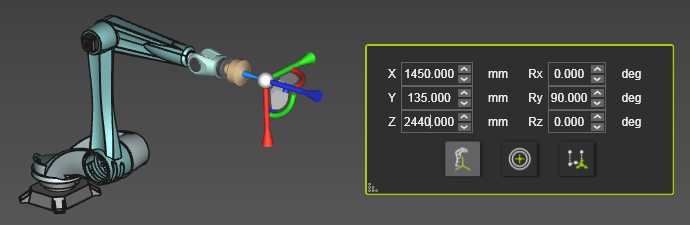
Wenn die Mittelkugel des Manipulators ausgewählt wird, erscheint das Positions-Dashboard. Dieses Dashboard zeigt die Positionskoordinaten und Orientierungswinkel des Manipulators. Die Position des Manipulators wird durch X-, Y- und Z-Werte angegeben. Die Ausrichtung wird durch die Winkel Rollrotation um die U-Achse, Nickrotation um die V-Achse und Gierrotation um die W-Achse angegeben.
Das Dashboard dient nicht nur Informationen, die angezeigten Werte sind bearbeitbare Parameter. Das Ändern einer Position oder eines Rotationswerts passt den Manipulator interaktiv an.
Positions- und Rotationswerte können direkt durch Eingabe des Wertes eingegeben werden. Die Spinner im Wertfeld können verwendet werden, um den Wert schrittweise zu erhöhen oder zu senken.
Wenn man auf die right mouse button klickt, öffnet sich ein kleines Stufenfenster.
Hier kann die Schrittweite eingestellt werden. Aus der Dropdown-Liste vordefinierter Schrittgrößen kann die bevorzugte Größe ausgewählt werden. Es gibt aber auch die Möglichkeit, eine benutzerdefinierte Größe festzulegen. Die Defiend-Schrittgröße wird in den Benutzereinstellungen gespeichert und wird daher für jede nächste Sitzung gespeichert.
Für die Positionsspinner gibt es eine Stufengröße und eine für die Rotationsspinner.
Es gibt drei Modi, in denen die Position und Orientierung des Manipulators definiert werden können.
| Zeigt Position und Rotation relativ zum Basisframe des OLP-Setups an und bearbeitet sie. |  | |
| Zeigt die Position und Drehung relativ zur aktuellen Position des Manipulators an und bearbeitet sie. Das Setzen des Modus oder das Zurücksetzen des Modus setzt alle Werte auf null (0), von wo aus ein neuer relativer (Inkrement-)Wert definiert werden kann. |  | |
| Zeigt Position und Rotation relativ zu einem Werkzeugwegelement an und bearbeitet sie. Das Werkzeugwegelement muss ausgewählt werden, bevor der Modus verwendet werden kann. |  |