Autonomous programming
![]()
Path optimization
Offline programming is normally geared towards achieving an optimal program toolpath in terms of:
-
avoiding collisions
-
keeping the machine / robot system away from singularities and axis limits
-
ensuring the reachability of the toolpath
-
aligning the process with reference values and keeping it within specified tolerances
-
running with minimal cycle time
-
fulfilling other custom guidelines.
After computing the program not always the best possible or optimal solution has been found to fulfill all the above goals. The program needs to be optimized globally or locally. This can be done by modifying the toolpath position and orientation, by editing its various attributes and parameters and by making use of the several available special attributes that assist in generation improved toolpaths.
Furthermore the software includes a set of so called autonomous program optimization functions. These functions, these methods are capable of generating and optimizing a toolpath under certain pre-defined conditions.
With this information in mind one could sketch the workflow of toolpath creation and the step of when to apply the automatic toolpath optimization as in the picture below.
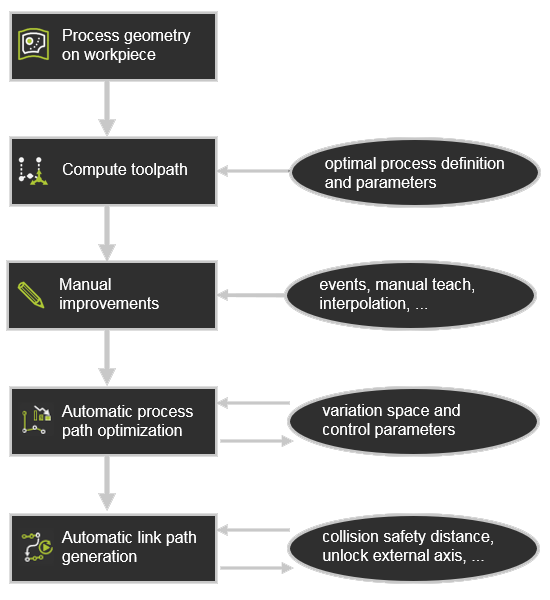
The autonomous steps evaluate the toolpath and then potentially optimizes any individual position, any part of the toolpath that the specific functionality addresses. It will however preserve explicitly defined (manual) programming events and will not overwrite them, such as:
-
teach events
-
manually taught positions
-
interpolations
-
jolt optimizations
-
suppressed positions.
Autonomous programming
Besides running these autonomous programming functionality at the existing program, operation groups or individual operations, they can be executed also when programming a new operation.
In the Process geometry definition panel and in the Programming settings panel there is an option to define if the autonomous programming functionality has to be executed immediately after the operation has been computed.
![]()
| Option | Description | |
|---|---|---|
| No optimization | The operation is computed. No further autonomous optimization will be executed. | |
| Full autonomous optimization | After the initial toolpath has been computed, all autonomous optimization methods will be run. | |
| Automatic process path optimization | The in-process part of the operation, the toolpath, will be optimized. | |
| Automatic link path generation | Optimize the motion, the link between operations to move collision free. |