Werkzeugweg-Bewegung
![]()
Befehl
Mit der Move Transformation wird der Werkzeugweg verschoben.
Es gibt nur eine Methode, um die Bewegungsoperation zu definieren.
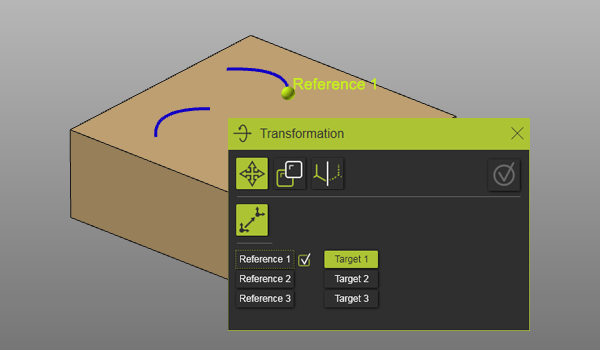
Punkt zu Punkt
![]()
Die Methode funktioniert in drei Paaren, bei denen ein Referenz- und ein Zielpunkt ausgewählt werden, um die Transformationsmatrix zu definieren.
Beginnend mit dem ersten Referenzpunkt im Panel muss der entsprechende 3D-Punkt ausgewählt werden, danach die passende Zielposition ausgewählt werden. Jede ausgewählte Referenz- oder Zielposition wird von einer kleinen Kugel dargestellt. Im Panel selbst wird ein Bestätigungszeichen angezeigt.
Jedes Referenz- und Zielpositionspaar erweitert die Transformationsmatrix.
| 1. Paar | Definiert die Translation (Vektor) zwischen Referenz- und Zielposition. |  |
| 2. Paar | Definiert die Rotation an der Zielstartposition. Der Winkel wird zwischen den Vektoren gemessen, die zwischen Punkt 2 und Punkt 1 erzeugt werden. | 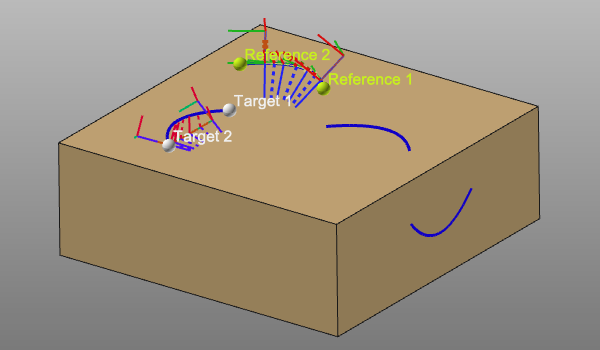 |
| 3. Paar | Definiert eine Achse-zu-Achse-Transformation. Mit Punkt 1 und 2 erzeugt Punkt 3 ein temporäres, lokales System an der Referenz- und Zielposition. | 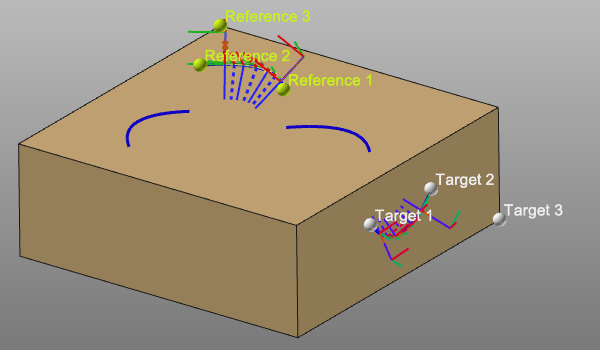 |
Ein Referenz- oder Zielpunkt kann durch Auswahl seines Steuerobjekts im Bedienfeld verändert werden. Der ausgewählte Punkt wird automatisch gelöscht, das Bestätigungszeichen verschwindet und ein neuer Punkt kann ausgewählt werden, um die Definition erneut zu vervollständigen.
Bild für Bild
![]()
Die Methode funktioniert, indem die Transformationsmatrix, eine Kombination aus Translation und Rotation, zwischen zwei ausgewählten Frames definiert wird. Hier können Rahmen und Achsensysteme ausgewählt werden. Außerdem muss die Anzahl der Duplikate festgelegt werden. Dann kann die Duplikation schließlich ausgeführt werden.
Im Kontrollfeld der Referenz und des Ziels erscheint der Name des ausgewählten Frames. Diese Referenz oder dieses Ziel kann modifiziert werden, indem man die Steuerung erneut aufnimmt und ein anderes Bild- oder Achsensystem auswählt.
Manipulatorposition
![]()
Die Methode verwendet den Manipulator als Referenz, um die Transformationsmatrix zu definieren. Der Manipulator selbst kann mit den Koordinaten- und Rotationsparametern positioniert werden. Dann wird die Transformation definiert. Es unterstützt eine Übersetzung oder Rotation, die durch Drücken des entsprechenden Symbols im Panel ausgewählt werden kann.
![]()
Die Übersetzung ist definiert durch:
| Translationsrichtung Die (Manipulator-)Referenzrichtung kann aus der Dropdown-Liste ausgewählt werden. Die Übersetzung kann in zwei Richtungen definiert werden. | |
| Werten Sie die Übersetzungsdistanz. |
![]()
Die Rotation ist definiert durch:
| Rotationsachse Die (Manipulator-)Referenzachse kann aus der Dropdown-Liste ausgewählt werden. | |
| Wert Der Rotationswinkel. |