Link path generation
![]()
Link path generation
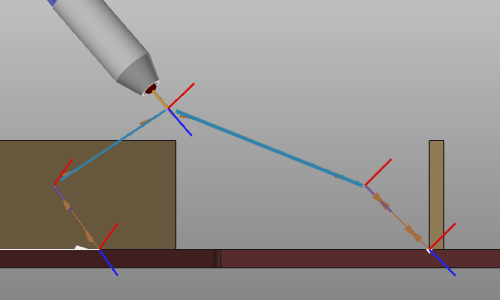
Automatic link path generation is a function with the main objective to create a motion path between two operations that is free of any collision between the manufacturing devices (tool, robot, etc.) and the workpiece or other equipment. Further objectives, like for example a minimum cycle time, may be included in the functionality as secondary requirements.
The function will generate more complex paths than a direct, straight connection between the operations.
The function works on existing toolpath structures, where it:
-
Automatically creates link paths between operations if needed.
-
Creates additional positions within the operation link path itself.
With the limitation, or boundary condition that:
- The retract positions of the first operation and the approach positions of the second operation need to be collision free, because the generator cannot modify these positions.
The picture below shows schematically the solution that will be generated.
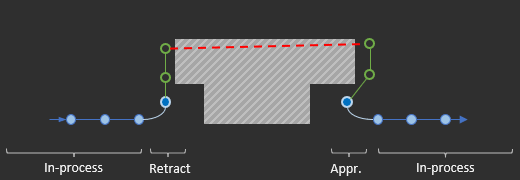 | 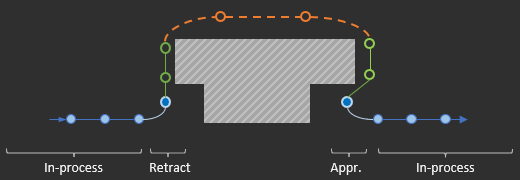 | |
| Before | After |
Conditions
Technology system configurations
Each technology has different boundary conditions and requirements. Different robot or machine types, their configuration and turn values (when applicable) and the preferred motion (PTP, lin, …) are of major importance to calculate the proper and expected link path. Taking this into account, there will be no general solution, based upon the workpiece geometry only. For each technology and manufacturing setup case, the system computes its own specific solution.
Dependency on linked operations
The operations themselves, that will be connected with a link path, can be modified or optimized with the various available programming functionality. It implies that the automatic link path generation may not change these operations while connecting. This means that:
-
Positional coordinates, robot configuration and turn values of the last process point of the source operation and the first process point of the target operation will be retained.
-
It may be therefore necessary to change the configuration and turn values on the link path itself (depending on motion type capabilities).
The motion type of the target point will be changed when it is not matching the used link strategy. Currently only PTP motions are used for linking.
External axes
Values of the external axes will be included in the calculation of the link paths. The axis values at the source operation’s last process point and the target operation’s first process point will be maintained. Even if these are modal and not explicitly specified, the value applied there is being retained.
Manual modifications
Toolpath positions, generated with the functionality, are editable manually.
-
Modified positions remain fixed and in that context will not be recomputed after update with the command.
-
Additional positions can be inserted in the link path.
Toolpath evaluation costs
The automatic generation of the link path may create more complex motion paths between the connecting operations than than that there was before, to achieve the main objective to run collision free. More complex motions inevitably lead to higher toolpath evaluation costs, which may lead again to incorrect validation of the program. And although the toolpath evaluation is done for the criteria collision, reachability, singularity and axis limit proximity, the link path is excluded from the costs determination, to avoid increasing costs indication.
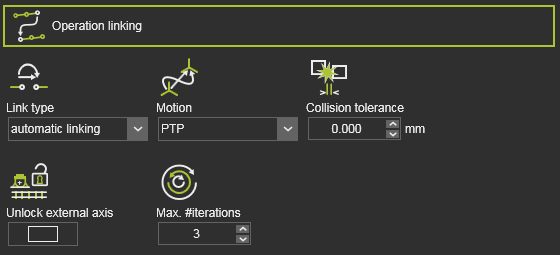
In the tech tab Operation linking of the Active program dashboard, the parameters of the link path can be set.
The attributes to control the computation of the link path.
| Attribute | Description | Remark |
|---|---|---|
| Link type | The type of the link path. | To enable the automatic generation, the type has to be set to automatic linking. |
| Motion | The motion type along the path. | |
| Collision tolerance | Defines the safety distance when generating the link path. | |
| (Displayed in Expert mode) | ||
| Unlock external axis | Use of the entire range of the external axis values for the link path generation. | Off: The external axis value can only be changed within the interval given by start and end point of the link path. On: The external axis values are to be considered within the full range of each axis (i.e. are unlocked). |
| Max. #iterations | Defines the maximum number of iterations that the path finding algorithm will run. |
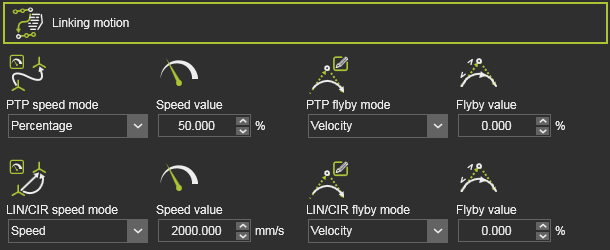
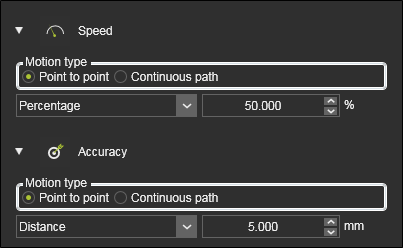
The attributes to control the motion along the link path.
| Attribute | Description | Remark |
|---|---|---|
| Speed mode | The motion speed. | Inherit: No additional motion event is required. The motion inherits its definition and value from the global PTP motion settings. Speed: The motion is defined as an absolute velocity value. Percentage: The motion is defined as a percentage of the resource’s maximum TCP speed value. |
| Speed value | The speed value of the motion. | |
| Flyby mode | The flyby motion, i.e. the accuracy to move along the link path positions. 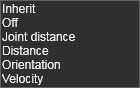 | Inherit: No additional accuracy event is required. The flyby accuracy inherits its definition and value from the global settings. Off: An event is created not to fly by the path position. |
| Flyby value | The value of the flyby accuracy. |
Events will be defined at the first position of the link path, but only if the attribute has been set here. Otherwise the motion inherits the values from the existing (global) definition.

Changes that are made here to the attributes require a regeneration of the link path by executing the command again.
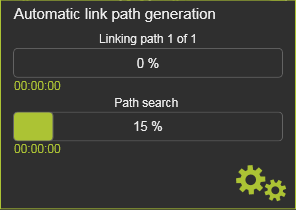
Path generation
The automatic link path generation uses a methodology of iterative steps to find the result. When it is executed, a panel appears to indicate the progress of the process.
Link path state
The state of the automatic generation is kept and made visible in the Toolpath monitor dashboard.
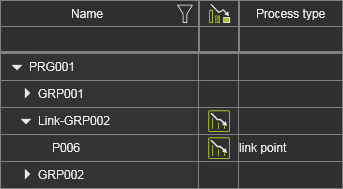
The column here indicates if the automatic link path generation process has been executed and what its status is.
| Empty; no automatic link path has been generated. | |
| The automatic generation has been run and is still valid. | |
| The automatic generation has been run, but is outdated (i.e. overrun) because of other (additional) modification. |