Calibration multipoint
Calibration à points multiples
![]()
Calibration
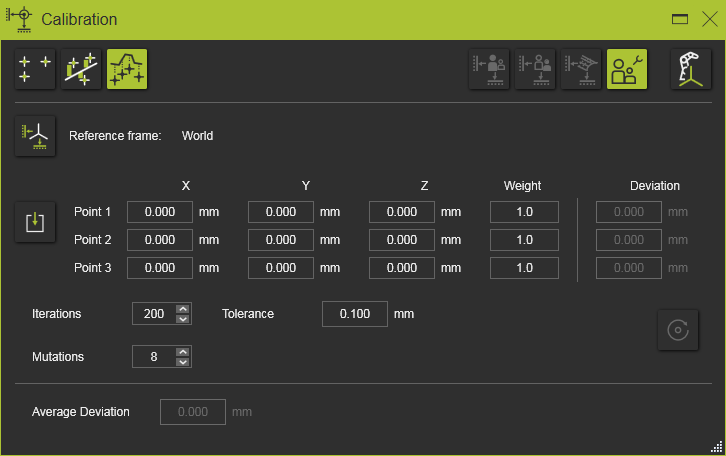
L’étalonnage multipoint est utilisé pour positionner au maximum une pièce dans la cellule virtuelle, en se basant sur des points mesurés à la surface de la pièce réelle dans sa position intégrée. La méthode calcule la transformation d’axe du nuage de points mesurés vers la pièce numérique.
Référentiel
![]()
Le bouton Reference frame est une option permettant de spécifier le système de coordonnées de référence (référentiel d’étalonnage) dans lequel les points mesurés sont importés. Par défaut, le système de coordonnées World est utilisé.
Importation
![]()
L’entrée pour l’étalonnage est un ensemble de coordonnées mesurées. Ces coordonnées sont généralement importées depuis un fichier externe, mais il est possible de saisir ou de modifier manuellement ces valeurs.
Le fichier d’entrée avec les points mesurés est un simple fichier texte lu ligne par ligne. Il comporte une première ligne optionnelle avec l’indicateur d’unité, suivie de trois lignes de coordonnées. Les droites de coordonnées doivent contenir exactement trois valeurs de coordonnées, séparées par un point-virgule. Chaque droite est interprétée comme les coordonnées X, Y et Z d’un seul point. Par défaut, ces points sont importés dans le système de coordonnées du monde spatial 3D, mais un autre système de coordonnées de référence peut être défini dans le tableau de bord. Un exemple de ce type de fichier d’importation est présenté ci-dessous.
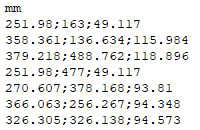
L’unité des coordonnées est spécifiée dans la première ligne du fichier. Toute unité, connue par le logiciel, peut être appliquée ici. Elle peut s’écrire en nom complet ou comme abréviation standard de cette unité. Cependant, lorsque la ligne d’unité manque dans le fichier, l’importation lira les coordonnées avec l’unité par défaut du système.
Le signe décimal de la coordonnée est indépendant des paramètres linguistiques et régionaux. Il faut toujours un point « . ».
Bien que l’unité dans le fichier d’importation ait été spécifiée, le tableau de bord affichera les coordonnées selon les unités système actuelles. Les valeurs sont ensuite converties lorsque nécessaire.
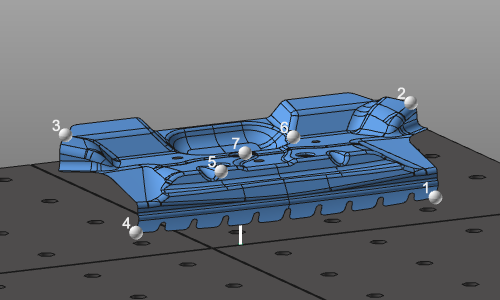
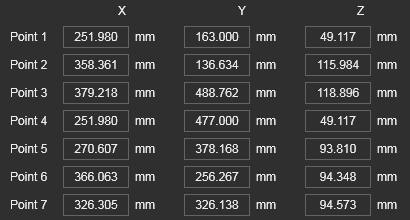
Avec le bouton Import, les données mesurées de la position de l’objet dans la vraie cellule de travail sont lues. Un navigateur de fichiers apparaît pour sélectionner le fichier de données. Les coordonnées mesurées sont affichées sous forme de sphères blanches dans l’espace 3D. Cette couleur par défaut peut être modifiée dans le Settings.
Le résultat de l’importation est affiché dans le tableau de bord. Les valeurs de coordonnées des positions mesurées peuvent être modifiées ici lorsque cela est nécessaire.
La méthode d’étalonnage inclut les paramètres suivants pour contrôler le calcul.
| Poids | Le facteur de poids détermine l’impact de la position mesurée sur l’étalonnage global. Cela peut être interprété comme une multiplication interne du nombre de points mesurés à la même position. Plus vous avez de points, plus l’impact lors du calcul est élevé. |
| Itérations | Le nombre maximal d’étapes d’itération pour calculer la position de la pièce à partir de sa position jusqu’au nuage mesuré de points. |
| Tolérance | La valeur pour terminer le calcul. Lorsque la déviation moyenne d’une étape de calcul est inférieure à la valeur de tolérance, le calcul est automatiquement terminé. |
| Mutations | Le maximum de variations de la rotation de la pièce pour correspondre au nuage mesuré de points A muteion est la variation de la position initiale de la pièce, à partir de laquelle le calcul itératif commencera. Une mutation sera atteinte en faisant tourner la pièce sur son axe X ou Z. Le nombre maximal de mutations couvre tout l’hémisphère en tournant à égal jusqu’à 2pi sur l’axe X et 1pi sur l’axe Z. Par exemple ; avec un maximum de 8 mutations, la pièce sera tournée sur son axe X par pas de 90 degrés et sur son axe Z par pas de 180 degrés. |
Exécuter
![]()
La calibration sera calculée en appuyant sur le bouton Execute. Contrairement aux autres méthodes d’étalonnage, celle-ci doit être exécutée manuellement.
Le tableau de bord reste ouvert. Cela permet de modifier tout ce qui est à l’entrée et de recalculer l’étalonnage. Fermer le tableau de bord ou lancer toute autre commande met fin au processus avec la dernière solution calculée.
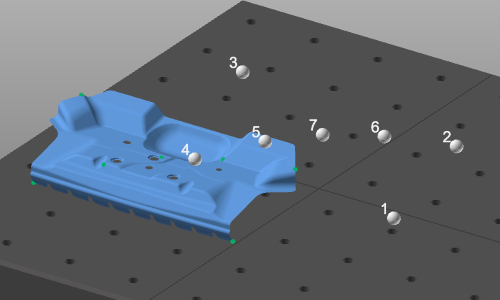
Après calcul du résultat, la déviation entre la nouvelle position de la pièce et le nuage mesuré de points est affichée dans le panneau de commande.
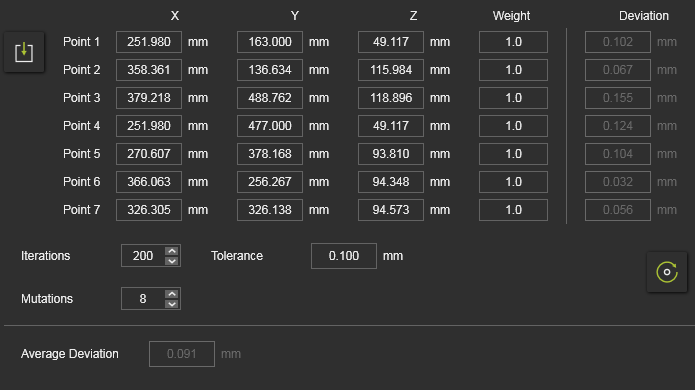
Pour chaque position mesurée individuelle, la déviation est affichée, ainsi que la moyenne de toutes les écartations.
L’étalonnage comporte trois niveaux d’interprétation du résultat, qui est montré dans le panneau d’étalonnage, en colorant la valeur moyenne de la déviation et en indiquant dans la vue 3D après chaque exécution :
 | L’étalonnage est validé comme réussie lorsque la déviation moyenne et celle des points individuels sont inférieures ou égales à la tolérance définie. |
 | L’étalonnage est validé comme avertissement lorsque l’écart moyen est inférieur ou égal à la tolérance définie, mais que l’écart des points individuels peut être supérieur à la tolérance. |
 | L’étalonnage est validé comme défaillant lorsque la déviation moyenne est supérieure à la tolérance définie. |
Option de résultat d’étalonnage
Le résultat de l’étalonnage est une transformation du composant. La manière dont elle sera appliquée peut être définie dans les options de résultat.
| Situation initiale. | 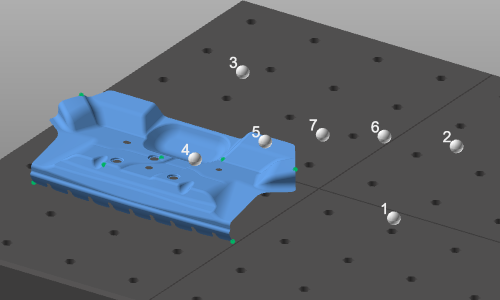 | ||
| Créer un nouvel adaptateur enfant | À la racine du composant calibré, un nouvel adaptateur enfant mécanique sera créé ; CalibPlug. Le composant lui-même n’est pas transformé. Le nouvel adaptateur peut être utilisé pour repositionner le composant selon les coordonnées d’étalonnage. | 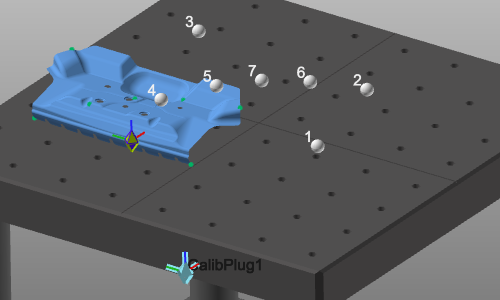 | |
| Pour les options de résultat suivantes, le composant doit être attaché à un autre ; par exemple, le positionneur de pièce monté au sol. L’adaptateur enfant du composant à calibrer a été connecté à l’adaptateur parent de l’autre composant. | |||
| Définissez la transformation | Le composant sera déplacé en position calibrée, mais les adaptateurs ne sont pas changés. Il y aura un décalage entre les deux composants connectés. Une ligne de connexion entre les deux adaptateurs est affichée. | 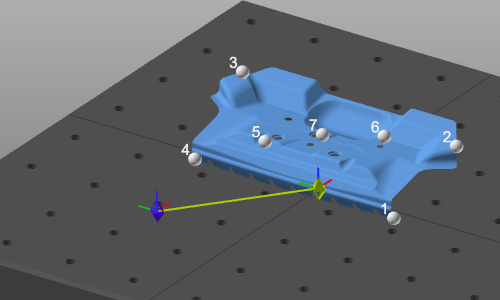 | |
| Déplacez l’adaptateur enfant | Le composant est déplacé en position étalonnée. Son adaptateur enfant est déplacé avec la transformation. Cela génère une modification de la définition du composant. Il faut donc le sauver à nouveau. | 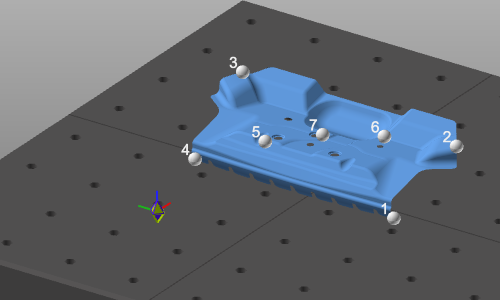 | |
| Déplacez l’adaptateur parent | Le composant est déplacé en position étalonnée. L’adaptateur parent du composant connecté est déplacé avec la transformation. Cela génère une modification de cette définition de composante connexe. Il faut donc le sauver à nouveau. | 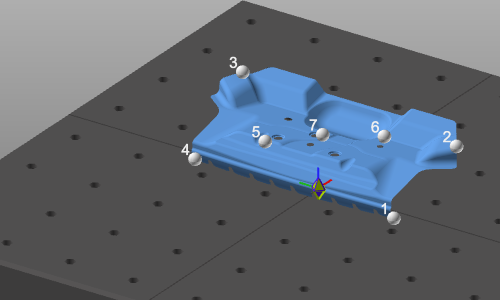 |
![]()
L’option Create base frame est un interrupteur pour créer une trame de base supplémentaire au niveau de l’adaptateur d’étalonnage.
