Tableau de bord de position du manipulateur
![]()
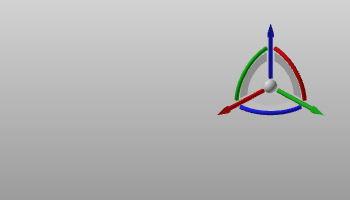
Lorsque la sphère centrale du Manipulateur est sélectionnée, le tableau de bord de position apparaît. Ce tableau de bord affiche les coordonnées de position et les angles d’orientation du Manipulateur. La position du Manipulateur est spécifiée par les valeurs X-, Y- et Z. L’orientation est spécifiée par les angles : rotation de roulis autour de l’axe X, rotation de tangage autour de l’axe Y et rotation en lacet autour de l’axe Z.
Le tableau de bord n’est pas seulement pour l’information, les valeurs affichées sont des paramètres modifiables. Changer une position ou une valeur de rotation ajustera le Manipulateur de façon interactive.
Les valeurs de position et de rotation peuvent être saisies directement en tapant la valeur. Les spinners dans le champ de valeur peuvent être utilisés pour augmenter ou diminuer la valeur par étapes.
Cliquer sur le right mouse button au-dessus des spinners ouvrira une petite fenêtre de taille de pas.
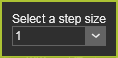
Ici, la taille du pas peut être fixée. À partir de la liste déroulante des tailles de pas prédéfinies, la taille préférée peut être choisie. Mais il offre aussi la possibilité de définir une taille définie par l’utilisateur. La taille du pas défiend est stockée dans les paramètres utilisateur et est donc conservée pour toute session suivante.
Il existe une taille de pas pour les spinners de position et une pour les spinners de rotation.
Il existe trois modes dans lesquels la position et l’orientation du Manipulateur peuvent être définies.
 | ||
| Affiche et modifie la position et la rotation par rapport au système de coordonnées global de la vue 3D. | 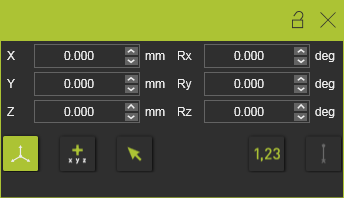 | |
| Affiche et modifie la position et la rotation par rapport à la dernière position du Manipulateur. Définir le mode, ou réinitialiser le mode, bascule toutes les valeurs à zéro (0), à partir d’où une nouvelle valeur relative (incrément) peut être définie. | 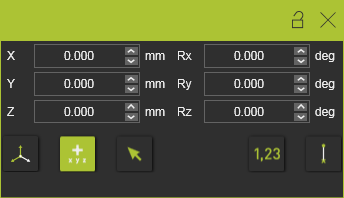 | |
| Affiche et modifie la position et la rotation par rapport à un système de coordonnées de référence local. Le système de coordonnées de référence local doit être sélectionné après l’activation ou le redémarrage du mode. La fenêtre de position sera temporairement désactivée jusqu’à ce que le système de coordonnées de référence soit sélectionné. | 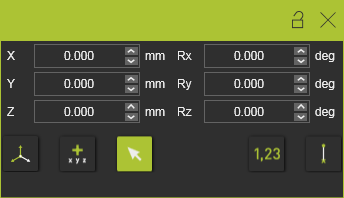 | |
| Les valeurs de la position et de l’orientation sont automatiquement arrondies à la valeur la plus proche selon la taille d’étape du paramètre. Cela s’applique à la fois au fait de glisser le Manipulateur et d’insérer une valeur ici. Cette action sera ignorée lorsque le Manipulateur est glissé ou claquement directement sur un élément de référence, comme un cadre ou un objet géométrique. | 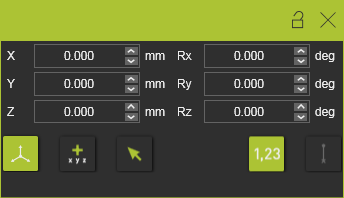 | |
| Montre ou masque une ligne de connexion noire entre la référence et la nouvelle position, lorsqu’on applique l’une des deux commandes de position relative. | 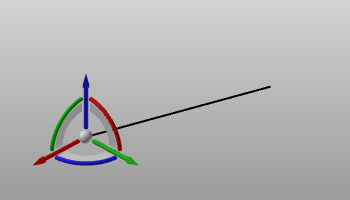 |
Le dernier mode appliqué reste actif à chaque fois lors de l’appel du Manipulateur.