Create the kinematic skeleton
![]()
The manipulator is used to build the kinematic skeleton of the resource. Its position and orientation is applied to create the joints of the skeleton.
Because a chain of kinematic joints is being built, instead of a random collection of individual elements, the joint that is going to be created is always attached to a parent object. This object can either be another joint or a frame. The first joint of the kinematic chain always will have the root frame as parent object, regardless if the joint itself lies at the root frame coordinates or not.
A joint is placed on an axis of a frame, using that axis as motion reference for translation or rotation. A manipulator axis will be used to generate this reference frame and its joint. On this axis the pie menu has to be called to create the required joint type.

| Select the type of kinematic joint that has to be created. | |
| Creates a driven translational joint at the axis. Or open the sub menu. |
| Creates a driven rotational joint at the axis. Or open the sub menu. | |
| After executing the command the joint has been created at the manipulator’s position. | |
 |
 |  | |
| Translational | Rotational |
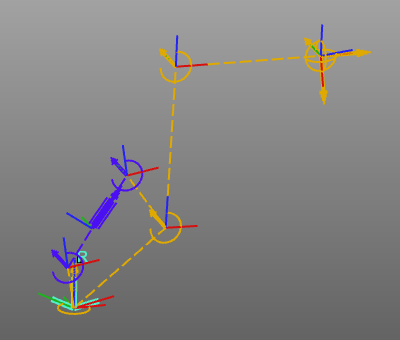
Each time a joint is created, the new one becomes active and will be the parent for the subsequent one to be created. The visualization of a kinematic skeleton is set up in such way that a connection line is displayed from each joint to its parent reference. The colors can be chosen in the Settings.
When designing a robot type of resource, or any other device that uses driven (synchronous) joints and inverse kinematics, it is highly recommended to validate and ensure that the resource properties and motion behavior truly represents the real physical device, before using it in simulation situations.