Joint attributes
Joint attributes
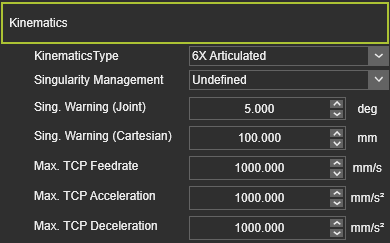
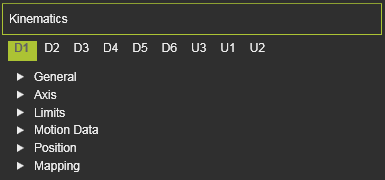
The Kinematics container opens with a list with all the defined attributes within the component, shown by their names. Selecting one of them will show its attributes sorted in six groups. A cross highlighting in the 3D View and the dashboard UI appears.
In case the resource is a production type resource with a kinematic skeleton, the Kinematic container includes some specific behavior attributes.
| Attribute | Description | Applies to |
|---|---|---|
| Kinematics type | The characteristics of the kinematic behavior of the resource. 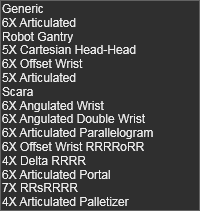 | |
| Singularity Management | The behavior of the resource when it reaches its singularity position. | |
| Sing. Warning Joint | The joint angle to display a warning when the resource almost reaches its singularity position. | |
| Sing. Warning Cartesian | The distance to display a warning when the resource almost reaches its singularity position. | |
| Max. TCP Feedrate | The operation speed of the TCP of the resource; value in mm/s. | |
| Max. TCP Acceleration | The maximum acceleration of the TCP; value in mm/s2. | |
| Max. TCP Deceleration | The maximum deceleration of the TCP, value in mm/s2. |
A kinematic joint has the following base attributes. At creation of the joint the default values for the attributes are given by the software, depending on the choice of type of joint. The attributes are shown and editable in the dashboard functions of the different Workbenches that support the creation of kinematic joints.
| Attribute | Description | Remark |
|---|---|---|
| Name | The name of the joint. | A blank name is allowed. |
| Kinematic type | The type of the joint according to the classification as described above. | |
| Joint type | The class of the joint according to the classification as described above.  | |
| Current value | The current value of the motion capability, relative to its design position. | Value in mm or degree. |
| Indexed axis | A switch to set if the axis motion, the axis position is indexed, i.e. pre-defined in steps instead of a free motion. When set, the following attributes appear: | Applies only to the asynchronous joint type |
| Step Size | The incremental value in which the axis moves to its next position. | |
| Offset | The starting value as offset from the initial lowest position. The indexed steps are then executed from this offset position. | |
| X, Y, Z | The motion vector of the joint. | Coordinates are set to the component’s global coordinate system. |
| Minimum, Maximum | The minimum and maximum value of the joint motion. | Value in mm or degree. |
| Velocity | The speed with which the joint moves. | Value in mm/s. |
| Acceleration | The acceleration of the joint to reach its velocity. | Value in mm/s2. |
| Deceleration | The deceleration of the joint to stop. | Value in mm/s2. |
| X, Y, Z | The X,Y and Z coordinates of the joint. | Coordinates are set to the component’s global coordinate system. |
| Roll(X), Pitch(Y), Yaw(Z) | The roll, pitch and yaw orientation of the adapter. | Orientation angles are set to the component’s global coordinate system. |
| Define current value | Defines the value that the current position has to represent. This can be different from the value according the design or other source of information. | Value in mm or degree. |
| Offset to math. model | Defines the value that the current position has to be offset from the mathematical model that the software is using to generate the position. | Value in mm or degree. |
More kinematics reference information
Was this page helpful?