Connecteurs de simulation externes
Connecteurs externes
![]()
FASTSUITE Edition 2 prend en charge les connecteurs externes suivants pour la simulation :
Contrôleur robot virtuel VRC
| ABB VRC |
Se connecte à ABB comme contrôleurs virtuels pour une planification réaliste des mouvements des robots ABB.
Le logiciel suivant est nécessaire pour connecter le VRC ABB au contrôleur virtuel ABB :
- RobotStudio ou outil d’exécution des communications robotiques Serveur VRC
Le connecteur utilise les attributs
| Chemin du contrôleur virtuel | Le chemin d’installation du contrôleur virtuel. |
| Chemin du dossier des programmes (optionnel) | Le chemin où l’on trouve le(s) programme(s). Si les ProgramsFolderPath et ProgramEntryPoint sont spécifiés, tous les programmes de ce dossier seront chargés sur le contrôleur et l’exécution du programme sera lancée automatiquement. |
| Point d’entrée du programme (optionnel) | Le nom du programme. Si les ProgramsFolderPath et ProgramEntryPoint sont spécifiés, tous les programmes de ce dossier seront chargés sur le contrôleur et l’exécution du programme sera lancée automatiquement. |
| DENSO VRC |
Se connecte au VRC de DENSO via l’interface ORiN2 pour une planification réaliste des mouvements des robots DENSO.
Le connecteur utilise l’attribut
| Identifiant | Chemin complet du fichier WINCAPS III (WPJ). Lorsque l’entrée est « * », elle se connecte au fichier WPJ activé. |
| FANUC VRC |
Se connecte avec FANUC ROBOGUIDE V7, V8 et V9 en tant que contrôleur virtuel ou avec les contrôles robotiques FANUC R-30iA et FANUC R-30iB pour une planification réaliste des mouvements des robots FANUC.
Le connecteur utilise les attributs
| Adresse IP | L’adresse IP de la connexion. L’adresse IP par défaut pour se connecter à Roboguide est 127.0.0.1. Lors de la connexion à un véritable contrôleur, l’adresse IP du robot doit être saisie (Menu->Setup->Host Comm->TCP/IP->adresse IP). |
| Port | Le numéro de port est nécessaire pour se connecter au contrôleur robot. Le portage se trouve dans Roboguide (navigateur Cell >Propriétés du contrôleur robotique >Faites défiler vers le bas dans l’ordre et la configuration >le numéro de « Robot IF Server » correspond au port). Pour une connexion à un contrôleur réel, le port est également nécessaire. |
| KAWASAKI VRC |
Le connecteur utilise les attributs
| Adresse IP | L’adresse IP de la connexion. |
| Port | Le numéro de port pour se connecter au robot contrôleur. |
| Kobelco VRC |
En connexion avec le VRC de KOBELCO pour une planification réaliste des mouvements des robots KOBELCO.
Le connecteur utilise les attributs
| IP | L’adresse IP de la connexion. |
| Port TCP | |
| Port UDP |
| Kuka OfficeLite |
Se connecte à KUKA OfficeLite en tant que contrôleur virtuel pour une planification réaliste des mouvements des robots KUKA.
Le connecteur utilise les attributs
| IP | L’adresse IP du serveur FASTSUITE E2. |
| Port | Le numéro de port de la connexion. |
| Nachi VRC |
Connexion avec le VRC de Nachi pour une planification réaliste des mouvements des robots Nachi.
Le connecteur utilise les attributs
| Animateur | |
| Port | Le numéro de port de la connexion. |
| Mécha principal numéro | |
| Un mech ext |
| Yaskawa VRC |
Se connecte au VRC de Yaskawa pour une planification réaliste des mouvements des robots Yaskawa.
 Le connecteur utilise les attributs
Le connecteur utilise les attributs
| Index des contrôleurs | |
| Index racine |
Contrôleur numérique virtuel VNC
| Fanuc VNC |
Se connecte à FANUC NCGUIDE en tant que contrôleur virtuel pour une planification réaliste des mouvements des machines CNC FANUC.
Le connecteur utilise les attributs
| Adresse IP | L’adresse IP de la connexion. L’adresse IP par défaut pour se connecter à NCGuide est 127.0.0.1. Lors de la connexion à un contrôleur réel, l’adresse IP de la machine doit être saisie (Menu->Setup->Host Comm->TCP/IP->adresse IP). |
| Port | Le numéro de port est nécessaire pour se connecter au contrôleur. |
| Prima VNC |
Se connecte à Prima comme contrôleur virtuel pour une planification réaliste des mouvements des machines CNC Prima.
Le connecteur utilise les attributs
| Adresse IP | L’adresse IP de la connexion. |
| SINUMERIK VNC |
Se connecte au contrôle CNC virtuel SINUMERIK pour une planification réaliste des mouvements des machines NC et des robots opérés avec un contrôle 840D.
Le connecteur utilise les attributs
| Type de botte | Les types de démarrage SRAM, IBN ou DATA SIM sont disponibles. |
| Chemin du contrôleur | Le chemin vers le fichier de démarrage de la manette. La version du connecteur choisi et celle du fichier de démarrage spécifié doivent correspondre. |
| Chemin INI | Le chemin du fichier INI. |
| Chemin du dossier des programmes | Le chemin du dossier avec les programmes SPF et MPF. Tous les programmes sont automatiquement chargés sur le contrôleur au démarrage et le premier programme MPF trouvé est sélectionné. |
Contrôleur logique virtuel VLC
| Beckhoff TwinCAT 3 OPC-UA |
Le connecteur utilise les attributs
| URL serveur | L’adresse du serveur OPC-UA. Par défaut : opc.tcp ://localhost :4840 |
| Identifiant fixe | L’URL du serveur contient une partie fixe et une partie flexible. La partie fixe doit être définie avec cet attribut. La partie flexible vient des ports de manette du constructeur de layouts. « MAIN » est le nom du programme. Par défaut : MAIN |
| Mitsubishi OPC-UA |
Connexion avec Mitsubishi GX Works
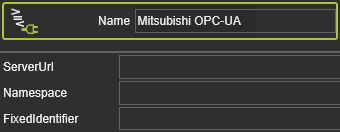
Le connecteur utilise les attributs
| URL serveur | L’URL du serveur OPC-UA. Par défaut : opc.tcp ://localhost :4841 |
| Espace de noms | L’index de l’espace de noms. Par défaut : 4. |
| Identifiant fixe | L’URL du serveur contient une partie fixe et une partie flexible. La partie fixe doit être définie avec cet attribut. La partie flexible vient des ports de manette du constructeur de layouts. « Espace d’adressage » est indispensable, suivi du nom de l’appareil « SoftPLC ». Par défaut : Address Space.SoftPLC |
| Siemens PLCSim |
Se connecte aux instances de simulation de PLC Siemens.
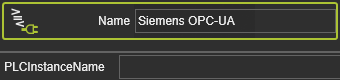
Le connecteur utilise l’attribut
| Nom de l’instance PLC |
| Siemens PLCSim Advanced |
Contrenects avec Siemens PLC Sim Advanced, instances prédéfinies.
Le connecteur utilise l’attribut
| Nom de l’instance PLC |
Autres
| Profondeur de profondeur asynchrone |
Ce connecteur utilise un fichier CSV en entrée. Le fichier contient un tableau des axes et du temps qui définissent le mouvement à utiliser dans la simulation.
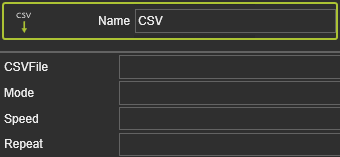
Le connecteur utilise les attributs
| fichier CSV | Le chemin complet du fichier CSV. |
| Mode | Interprétation et simulation du contenu CSV. Le mode simulation est défini par une valeur entière : |
| Vitesse | Facteur de simulation. Lorsque le mode est à 0, le temps de permanence (sec) est fixé à chaque étape. Si le mode n’est pas 0, il indique le taux de vitesse de simulation (par exemple 1 = 100 %, 2 signifie 2 fois plus rapide). |
| Répétez | Compte des cycles de simulation. 0 = simulation sans fin. |
| 0 | Exécutez la simulation par index, avec un temps de séjour (seconde) défini en Vitesse. |
| 1 | Exécutez la simulation par temps, sans interpolation conjointe entre 2 enregistrements (avant et après). |
| 2 | Exécutez la simulation par temps, avec une interpolation conjointe entre 2 enregistrements (avant et après). |