Simulation interactive
![]()
Mouvement conjoint
C’est une fonction très pratique pour manipuler un objet cinématique uniquement avec la souris. Lorsque le mode est activé, la Vue 3D ne montre que la ressource avec son squelette d’articulations et les connexions entre elles. Les châssis et noms des joints sont automatiquement masqués.
Chaque joint entraîné, ou sa géométrie attachée, peut être détaché avec le bouton gauche de la souris. L’articulation devient active et sa représentation graphique montre un symbole coloré représentant les limites et la position locale de mouvement de cette articulation. En continuant à appuyer sur le bouton gauche de la souris et en la faisant glisser, la géométrie jointe déplacera alors. Bien que l’image ci-dessous ne montre que le joint de rotation, l’interaction avec la souris s’applique aussi aux joints de translation.
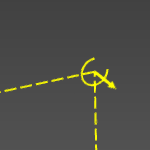 |  | |
| Par défaut | Interagi |
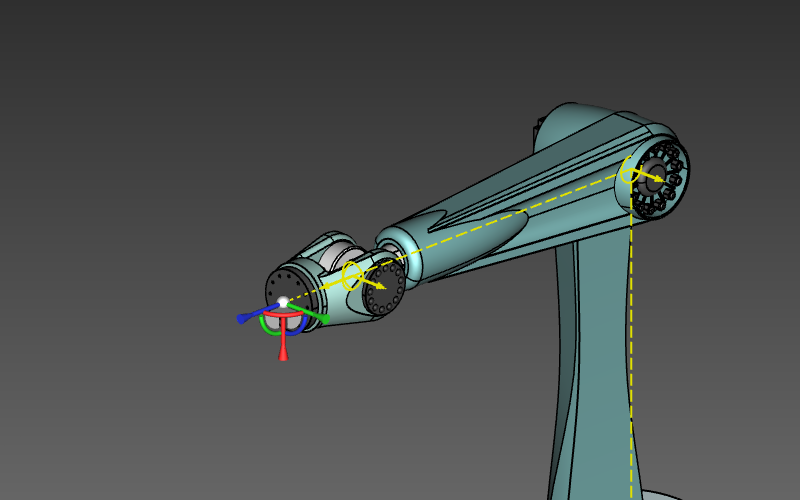
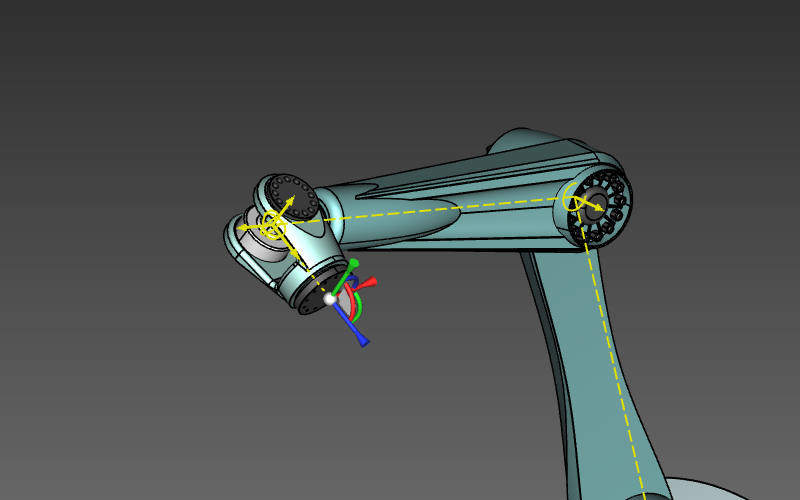
Lors de l’interaction avec une articulation faisant partie d’une chaîne cinématique, toutes les autres articulations reliées en aval (enfants) à la jonction interagie se déplacent avec la manipulation. Seulement, et bien sûr, leurs positions relatives (position et angle) ne changeront pas pendant cette manipulation.
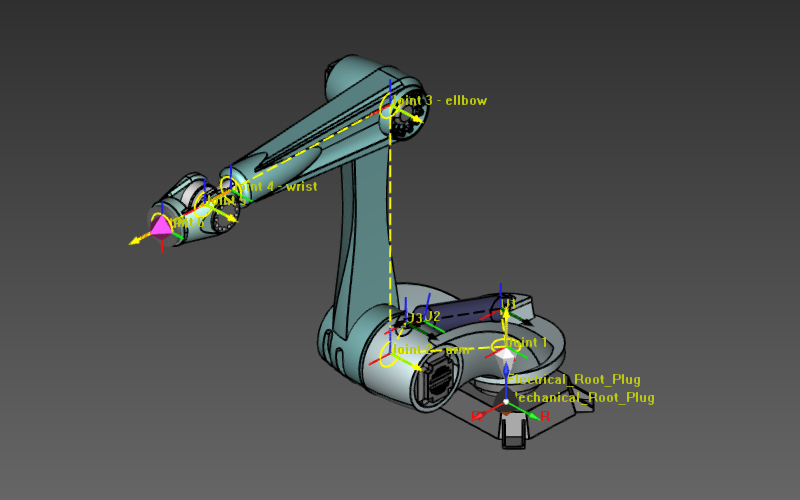 |  | |
| Avant | Après |
Cinématique inverse
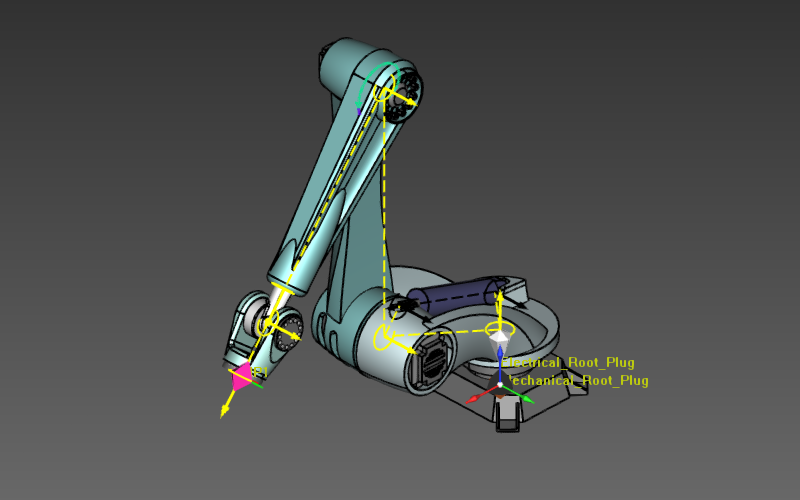
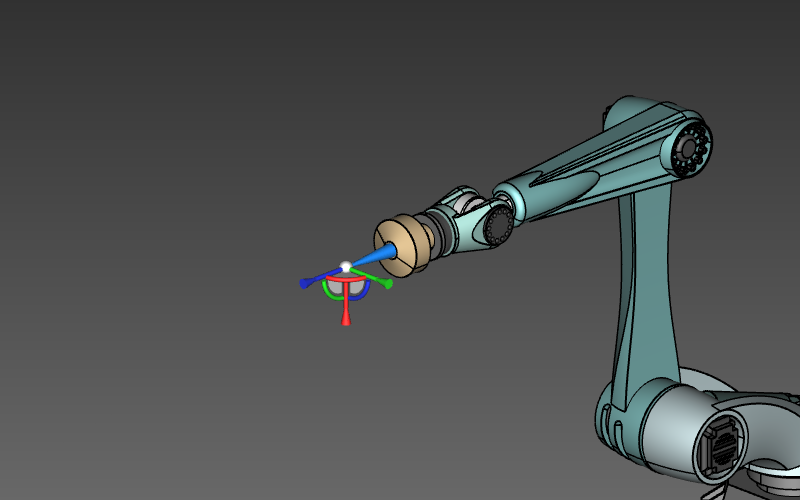
Lorsque la ressource est équipée d’un cadre d’outil, il sera possible de simuler la ressource en utilisant le calcul cinématique inverse. Le manipulateur interactif du cadre d’outil devient visible et, similaire au manipulateur 3D, il peut être déplacé (déplacé et tourné) à la position souhaitée dans la vue 3D. Aujourd’hui, aucun joint n’est manipulé, mais en fonction de la position et de l’angle du cadre de l’outil, toutes les positions et angles internes des assemblages sont calculés.
 |  | |
| Avant | Après |
![]()
Il est possible de tirer le manipulateur de châssis d’outil à une position ou un angle qui se situe hors de la portée de la chaîne cinématique. Dans ce cas, la ressource elle-même s’arrêtera à sa position limite, où le manipulateur de châssis d’outil peut être traîné plus longtemps. Un symbole de faisceau est affiché entre cette position limite et celle du manipulateur pour indiquer le mouvement hors portée.
 | 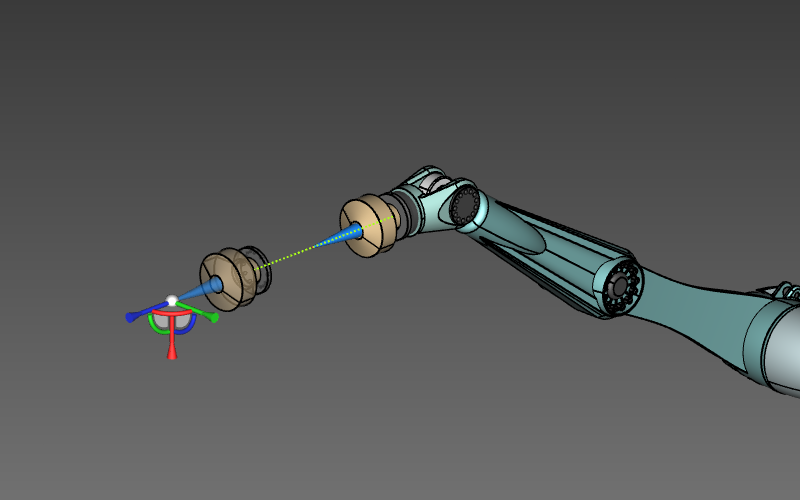 | |
| Portée à portée | Portée extérieure |
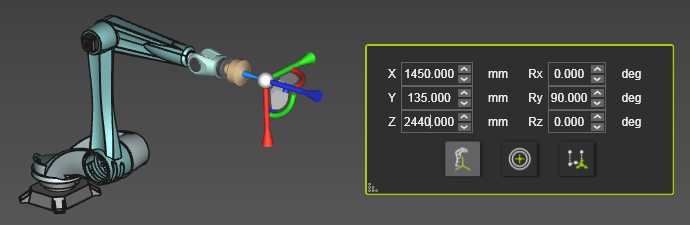
Lorsque la sphère centrale du Manipulateur est sélectionnée, le tableau de bord de position apparaît. Ce tableau de bord affiche les coordonnées de position et les angles d’orientation du Manipulateur. La position du Manipulateur est spécifiée par les valeurs X-, Y- et Z. L’orientation est spécifiée par les angles : rotation de roulis autour de l’axe U, rotation de tangage autour de l’axe V et rotation en lacet autour de l’axe W.
Le tableau de bord n’est pas seulement pour l’information, les valeurs affichées sont des paramètres modifiables. Changer une position ou une valeur de rotation ajustera le Manipulateur de façon interactive.
Les valeurs de position et de rotation peuvent être saisies directement en tapant la valeur. Les spinners dans le champ de valeur peuvent être utilisés pour augmenter ou diminuer la valeur par étapes.
Cliquer sur le right mouse button au-dessus des spinners ouvrira une petite fenêtre de taille de pas.
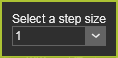
Ici, la taille du pas peut être fixée. À partir de la liste déroulante des tailles de pas prédéfinies, la taille préférée peut être choisien. Mais il offre aussi la possibilité de définir une taille définie par l’utilisateur. La taille du pas défiend est stockée dans les paramètres utilisateur et est donc conservée pour toute session suivante.
Il existe une taille de pas pour les spinners de position et une pour les spinners de rotation.
Il existe trois modes dans lesquels la position et l’orientation du Manipulateur peuvent être définies.
| Affiche et modifie la position et la rotation par rapport à la trame de base de la configuration OLP. |  | |
| Affiche et modifie la position et la rotation par rapport à la position actuelle du manipulateur, à partir de laquelle il est déplacé. Définir le mode, ou réinitialiser le mode, bascule toutes les valeurs à zéro (0), à partir d’où une nouvelle valeur relative (incrément) peut être définie. |  | |
| Affiche et modifie la position et la rotation par rapport à un élément de trajet d’outil. L’élément de trajet d’outil doit être sélectionné avant que le mode puisse être utilisé. |  |