Controller OLP translator
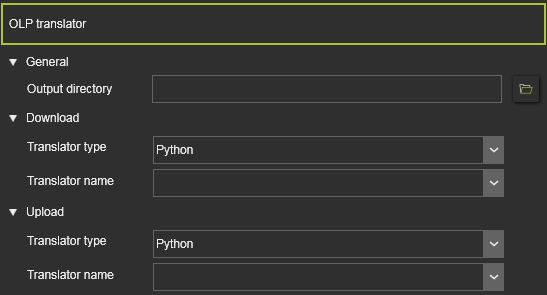
OLP translator
To be able to export the simulated program to the physical robot or manufacturing machine, the program needs to be written in the correct, corresponding language.
| Attribute | Description |
|---|---|
| General | |
| Output directory | The path and file name where to store the program output file. |
| Download / Upload | |
| Translator type | The data format of the translator, to filter the list of available translators. It can be selected between: |
| Translator name | From the drop down list, the required downloader or uploader file, with the translator definitions and commands, has to be selected. A translator is vendor specific. Depending on the controller manufacturer, the system searches in the plugin folder(s) for the available translators of that manufacturer. |
More controller reference information
Was this page helpful?