Sealing, gluing and other contour deposition
![]()
Contour deposition technologies
Programming a toolpath for sealing basically generates a cycle that consists of three sections:
![]()
approach (off-process)
![]()
sealing process (in-process)
![]()
retraction (off-process)
The cycle is calculated and controlled by the programming attributes and events.
Programming attributes
The display of the programming attributes in the Programming defaults and Active program dashboards is defined in a Settings.xml file. With a standard installation, a default file is located at the path <install>\E2Plugin\Technologies\SealingTechnology\Standard\ControllerSettings.
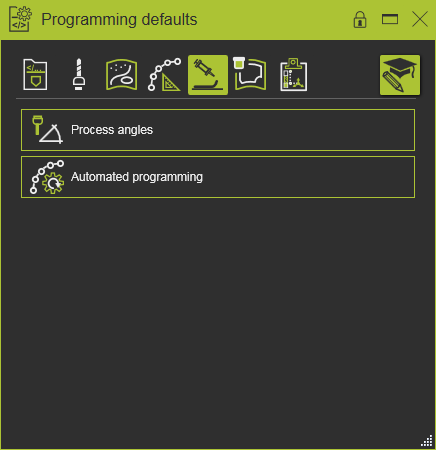
For the standard controller the following attributes have been defined.
| Tech tab | Container | Attribute | Description |
|---|---|---|---|
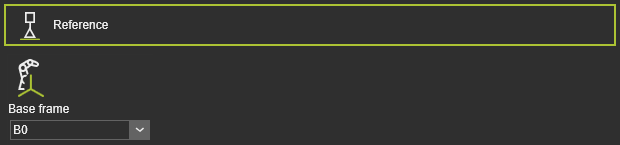 | The program reference information. |
| Base frame | The reference frame of the program. |
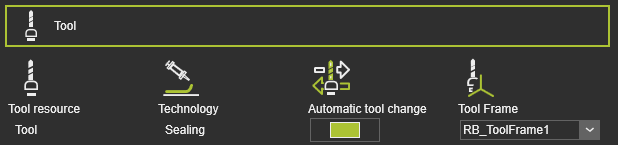 | Tool information. |
| Tool resource | The name of the tool. |
| Technology | The applied technology. |
| Automatic tool change | |
| Tool frame | The tool frame that runs the toolpath. |
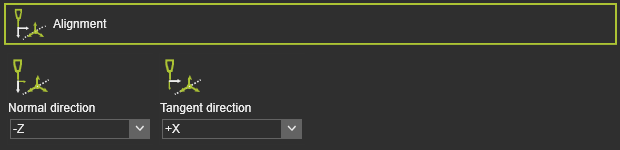 | The mapping of the tool frame axes with the corresponding vectors on the process geometry. |
| Normal direction | The alignment of the tool frame Z axis with the normal direction of the process geometry. |
| Tangent direction | The alignment of the tool frame X axis with the tangent direction of the process geometry. |
| The global transformation of the manufacturing geometry. | |
| Translation in X,Y,Z | The global translation in X,Y or Z direction. |
| Rotation around X,Y,Z | The global rotation around the X,Y or Z axis. |
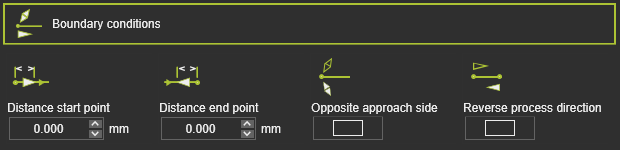 | The boundary conditions on the manufacturing geometry to calculate the toolpath. |
| Distance start point | The distance of the first in-process point from the process geometry start position. |
| Distance end point | The distance of the last in-process point to the process geometry end position. |
| Opposite approach side | To reverse the approach side at the manufacturing start position. |
| Reverse process direction | To reverse the manufacturing process direction, i.e. changes start to end position and vice verse. |
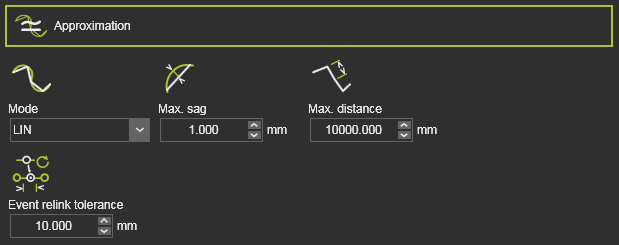 | The approximation of the manufacturing contour to calculate the toolpath. |
| Mode | The mode to approximate the contour. |
| Max. sag | The maximum allowed deviation between the geometry and calculated toolpath. |
| Max. distance | The maximum distance between two in-process toolpath elements along the contour. |
| Event relink tolerance | The tolerance to find the nearest TPE after a toolpath re-computation, to assign the existing event to. This attribute is hidden by default. |
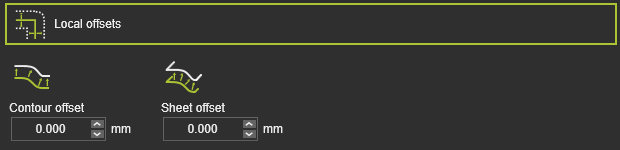 | The offset of the toolpath element from its original location on the manufacturing geometry. |
| Contour offset | The offset in bi-tangent direction. |
| Sheet offset | The offset in (surface) normal direction. |
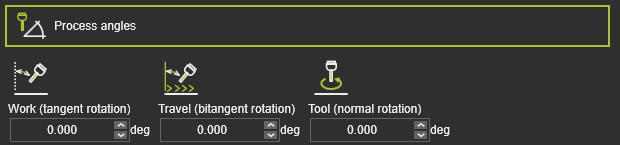 | The operational orientation of the tool resource. |
| Work (tangent rotation) | The work angle, i.e. tangent rotation. |
| Travel (bitangent rotation) | The travel angle, i.e. bitangent rotation. |
| Tool (normal rotation) | The tool angle, i.e. normal rotation. |
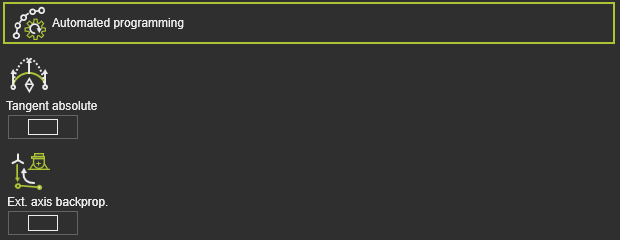 | Additional (optimization) conditions to calculate the toolpath. |
| Tangent absolute | A switch to automatically apply a tangent absolute direction on the in-process path of the operation. The tangent direction of the first in-process point will be used as reference. |
| Ext. axis backprog. | The axis values of an external resource, like a positioner, as been set at the first position of the in-process path, will be propagated backwards up to the approach of that in-process path. |
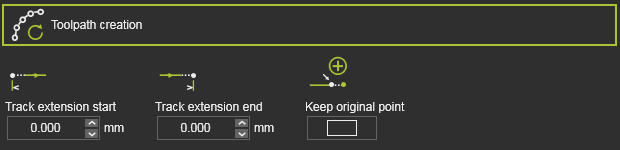 | The extension at the track ends when programming an operation. |
| Track extension start | The value of the extension length. A negative value is possible. |
| Track extension end | The value of the extension length. A negative value is possible. |
| Keep original point | Switch to define if the original path element (position) is being moved to the overrun position or remains at its original position. In the last case a new path element is created at the overrun position. |
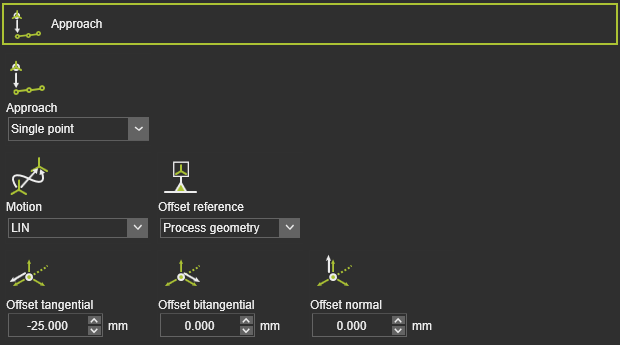 | To define an approach motion towards the in-process toolpath. |
| Approach | The number of approach steps. |
| Motion | The motion type for the approach. |
| Offset reference | The reference to determine the offset directions. |
| Offset tangential / bitangential / normal | The local offset of the approach step from the in-process toolpath start element. |
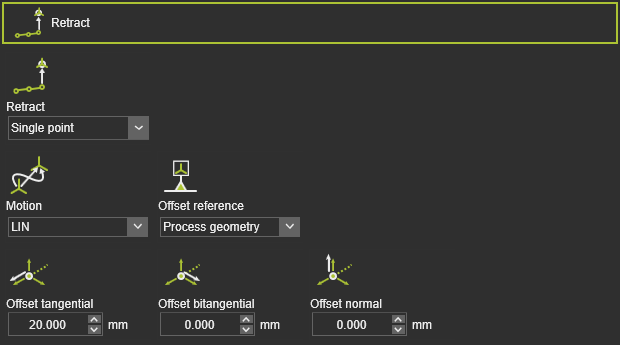 | To define a retraction motion away from the in-process toolpath. |
| Retract | The number of retraction steps. |
| Motion | The motion type for the retract. |
| Offset reference | The reference to determine the offset directions. |
| Offset tangential / bitangential / normal | To local offset of the retract step from the in-process toolpath end element. |
 | The actions when starting the dispersion of the sealant. |
| Gun on | Sets the event to turn on the sealing gun. |
 | The actions when stopping the dispersion of the sealant. |
| Gun off | Sets the event to turn off the sealing gun. |
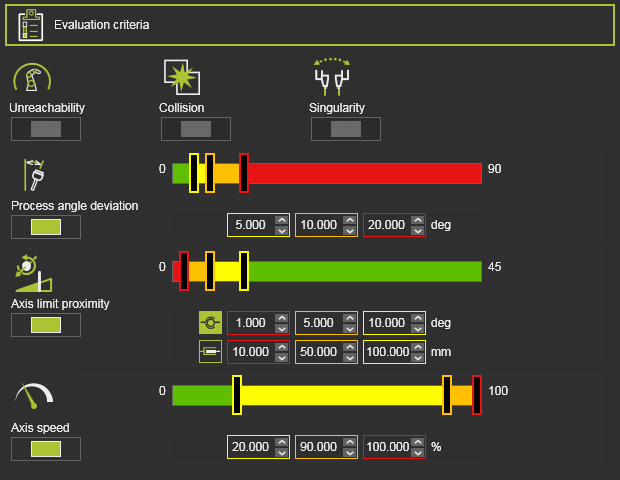 | The toolpath quality evaluation criteria. The exact content may vary per technology. |
| Unreachability | Evaluates unreachable situations of the robot or machine. |
| Collision | Evaluates collision situations. |
| Singularity | Evaluates singularity situations of the robot or machine. |
| Process angle deviation | Evaluates the process angle deviation from its reference value. |
| Axis limit proximity | Evaluates the proximity to the limits of the driven axis. Separated evaluation value range for linear and circular joint axis. |
| Axis speed | Evaluates the axis speed of all driven axis as a (absolute) difference between the start and the end motion between positions. |
Program events
The standard sealing technology has the following programming events:
| Motion events | |
|---|---|
| Sets the velocity for the subsequent motions. | |
| Sets the accuracy for the subsequent motions. | |
| Sets a waiting time at the path element for the tool to remain position until moving further. | |
| Sets the acceleration for the subsequent motions. |
| IO signal events | |
|---|---|
| Adds a wait for an input signal event of the active controller. | |
| Adds a set output signal event of the active controller. | |
| Sets an event to synchronize cooperating robots. | |
| Sets a port of a resource. | |
| Waits for a port of a resource. | |
| Sets a signal of a mechanical parent adapter to create or delete a mechanical connection during simulation. |
| Technology event | |
|---|---|
| Inserts a comment. |
| Activates the sealant dispersion. | |
| Stops the sealant dispersion. | |
| Sets the dispersion brush. |
Process simulation models
The sealing technology supports the following process simulation models:
More information
Was this page helpful?