Parallel plane strategy
![]()
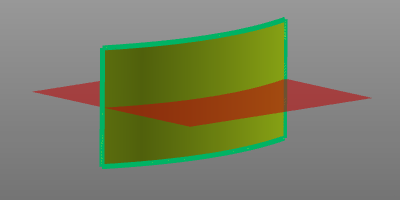
With the Geodesic from intersection command, the track creation strategy changes to this mode. The initial plane is the base to compute the parallel planes that intersect the surface process geometry to generate the toolpath tracks. This base plane is displayed as a red square.
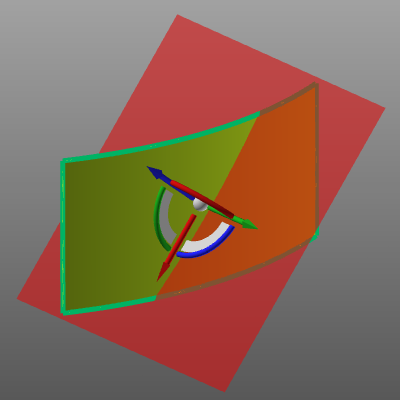
Picking the plane places the Manipulator on top of it to modify the plane’s position and / or orientation.
When the strategy is changed for an existing toolpath, this toolpath is recomputed automatically.
Was this page helpful?