Close the kinematic chain
![]()
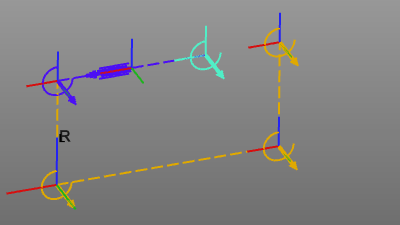
The Close chain command is needed to connect an undriven sub system of joints to the (main) kinematic skeleton.
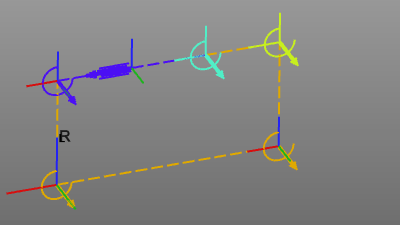
An undriven sub system has to start and end in between two driven joints of the same kinematic skeleton. See also the Reference Guide pages. Starting the creation of the sub system is the same as for a driven based skeleton; the joint to which it connects at the start has to be set active. Then the sub system is created according its design rules. Finally the Pie menu has to be called on the last joint of the sub system to execute the Close chain command. Selecting that joint to which it has to connect will close the undriven sub system.
 |  | 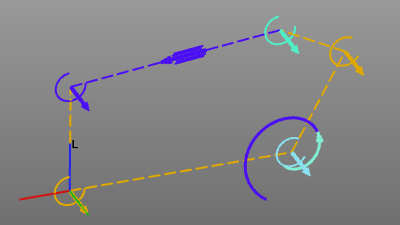 | ||
| Close the chain and simulate |
Was this page helpful?