#4.2 - Programmieren Sie die Oberflächenoperation
Programmiere den Oberflächenbetrieb
Zweck
Erstellen Sie eine Oberflächenreinigungsoperation und optimieren Sie den generierten Werkzeugpfad.
Verschiedene Strategien und Optimierungsmethoden werden angewandt, um die Trackqualität, das Prozessverhalten und die Download-Bereitschaft zu verbessern.
Schritte
1. Vorbereitung (falls nötig)
1.1 Wechsel zur Offline-Programmierungswerkbank
Wechsel zur OLP-Arbeitsbank
2. Erstelle die Oberflächenoperation
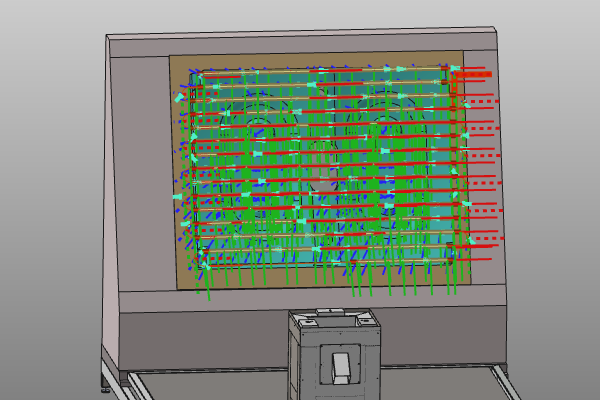
2.1 Programmiere die Oberfläche mit der Parallelebenenstrategie
Verwenden Sie die Parallelebenen-Spur-Strategie, um den Reinigungsflächen-Werkzeugweg zu berechnen.
Programmoberflächenwerkzeugweg
2.2 Überprüfen der Ergebnisse alternativer Strategien
Vergleichen Sie weitere Berechnungsstrategien und fahren Sie dann mit dem Ergebnis der parallelen Ebene für dieses Tutorial fort.
Vergleichen Sie die Strategieergebnisse
3. Optimiere den Werkzeugpfad
3.1 Überprüfung der Werkzeugwegdichte
Öffnen Sie das ToolPath-Dashboard und überprüfen Sie die Anzahl der Positionen entlang des Weges.
Toolpath-Dashboard
3.2 Punkte mit Annäherungseinstellungen reduzieren
Verwenden Sie die Annäherungsattribute des Active Program Dashboards, um die Anzahl der Positionen zu reduzieren.
Werkzeugwegpunkte reduzieren
4. Technologieoptimierung
4.1 Waffenaktivierungsmodi anpassen
Wechsle den Waffenaktivierungsmodus und simuliere es, um das Verhalten zu vergleichen.
Waffenaktivierungs-Setup
4.2 Sanfte Bewegung mit Genauigkeit und Geschwindigkeit
Attribute Genauigkeit und Geschwindigkeit bearbeiten für flüssige Roboterbewegungen.
Bewegungsqualitätsabstimmung
5. Streckenoptimierung
5.1 Globale Spurorientierung drehen
Gleisausrichtung
5.2 Abstand zwischen den Gleisen anpassen
5.3 Prozessfläche überlaufen
Erweitern Sie den Prozessbereich, um einen globalen Überlauf zu erzeugen. Verwenden Sie das Bearbeiten-Symbol, um Attribute auf Standardwerte zurückzusetzen.
5.4 Laufende Gleisabschnitte verlängern oder verkürzen
5.5 Hinzufügen oder entfernen von Spuren am Anfang oder Ende
5.6 Bewegung außerhalb des Prozesses zwischen den Spuren modifizieren
5.7 Definieren Sie das Brückenverhalten über Lücken
6. Laden Sie das Programm herunter
6.1 Generiere das Download-Paket für den Roboter-Controller
Programm herunterladen
7. Rettet das Projekt
7.1 Speichere das Projekt unter einem passenden Namen
Speichern des Projekts