Vorbereitung
Zweck
Lernen Sie, wie Sie Ihr Projekt vorbereiten, bevor Sie eine manuelle oder automatische Programmoptimierung durchführen.
![]()
Eine gute Vorbereitung verbessert die Ergebnisqualität, verkürzt die Iterationszeit und verhindert vermeidbare Optimierungsfehler.
Schritte
1. Ressourcenaufbau
1.1 Achsengrenzen überprüfen
Überprüfe, ob die Achsengrenzen für Maschine, Roboter und externe Ressourcen mit der physischen Einrichtung übereinstimmen.
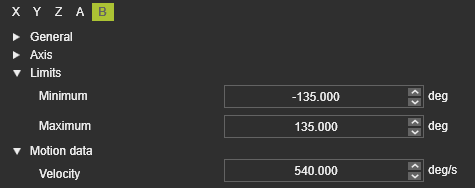
1.2 Achsengeschwindigkeitsgrenzen überprüfen
Bestätigen Sie, dass die maximalen Achsengeschwindigkeitswerte (Geschwindigkeit) korrekt definiert sind.
2. Kollisionsaufbau
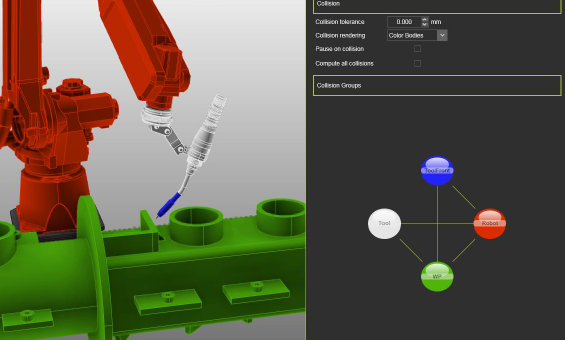
2.1 Definiere Kollisionsgruppen
Erstelle Kollisionsgruppen, damit keine permanenten Kollisionen zwischen aktiven Paaren existieren.
![]()
2.2 Unnötige Geometrie ausschließen
Entfernen Sie nicht-kritische Geometrie aus Kollisionsgruppen, um die Berechnungszeit zu reduzieren.

2.3 Kollisionspaarung überprüfen
Validiere Definitionen von Kollisionspaaren in den Simulationseinstellungen.
2.4 Prüfe auf versteckte Kollisionen
Führe vor der Optimierung eine Szenarioprüfung durch, um sicherzustellen, dass keine versteckten Kollisionen mehr vorhanden sind.
3. Programmparameter
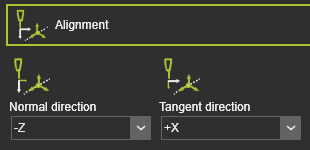
3.1 Setze Prozessstandardwerte
Setze die Programmierung standardmäßig auf den beabsichtigten Prozesszustand, einschließlich Werkzeugausrichtung und Prozesswinkeln.
3.2 Definiere klare Startpositionen
Programmiere explizite Startwerte für Maschine, Roboter und externe Achsen.
Enthalten Sie:
- Äußere Achsenwerte am ersten Werkzeugpfadelement.
- PTP-Bewegung zur ersten Position in jeder Operation.
- Annähern und zurückziehen Sie Positionen mit dem Eigenbewegungstyp.
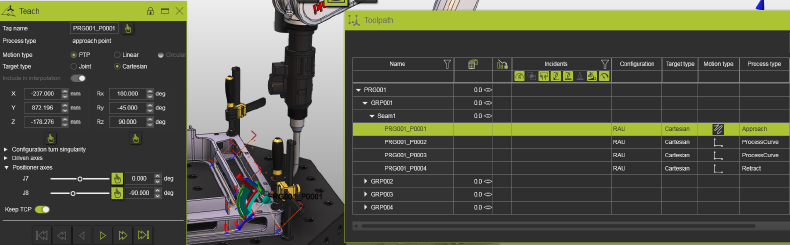
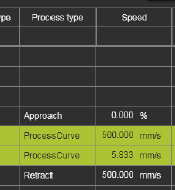
3.3 Geschwindigkeitswerte überprüfen
Stellen Sie sicher, dass die Prozesspositionen keine Nullgeschwindigkeit haben.
4. Definition der Werkzeugwegqualität
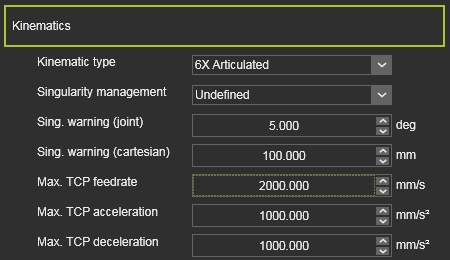
4.1 Offene Qualitätseinstellungen
Konfigurieren Sie Qualitätskriterien im Reiter Toolpath Quality Tech unter Programmierstandardeinstellungen oder Aktives Programm.
![]()

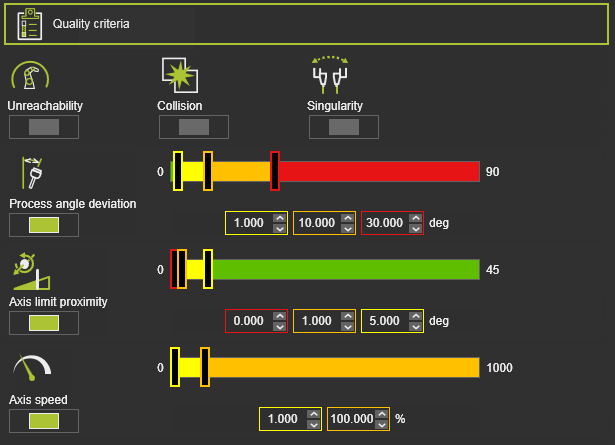
4.2 Aktivieren Sie relevante Kriterien
Aktivieren Sie die Kriterien, die für Ihr Szenario benötigt werden. Systemstandardeinstellungen sind in der Regel ein guter Anfang.
Beim Lichtbogenschweißen können die Werkzeugwinkelkriterien gelockert werden, wenn die anfängliche Werkzeugausrichtung flexibel ist.
4.3 Abstimmungsschwellenwerte
Anpassung der Grenzwerte, wo nötig, zum Beispiel maximale Prozesswinkelabweichung.
Nutzen Sie diese Stufen als Orientierung:
| Level | Indikator | Bedeutung |
|---|---|---|
| Beginn des No-Go-Bereichs |  | Ein Wert, der niemals übertroffen werden darf. |
| Beginn des kritischen Bereichs |  | Ein Wert, den man wenn möglich vermeiden sollte. |
| Beginn der Bewertung |  | Grenze, wo der ideale Bereich endet. |
In den meisten Fällen sollten Sie den Axis-Speed No-Go bei 100 % halten, um eine Verringerung der TCP-Geschwindigkeit in Prozessabschnitten zu vermeiden.
5. Berechnen und validieren Sie den initialen Werkzeugpfad
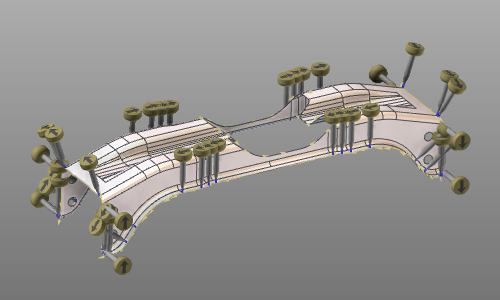
5.1 Berechnen Sie den Werkzeugpfad
Erstellen Sie den Werkzeugweg nach der Vorbereitung und fügen Sie bei Bedarf zusätzliche Start- und Endoperationen hinzu.
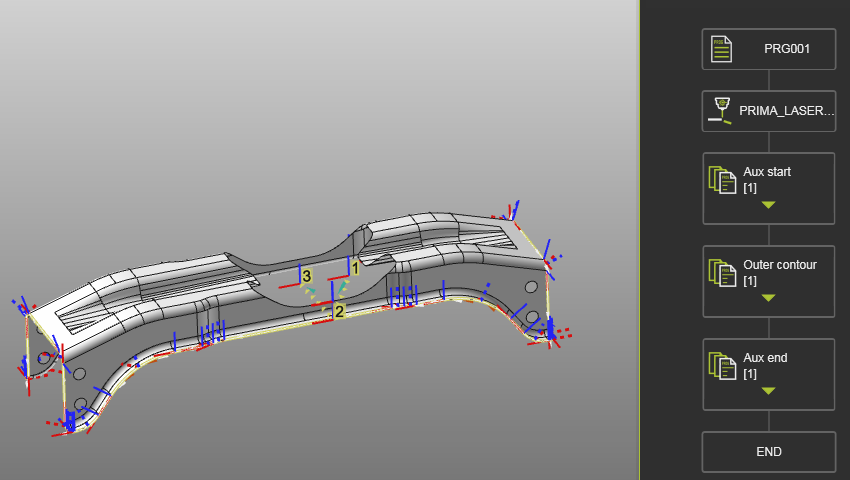
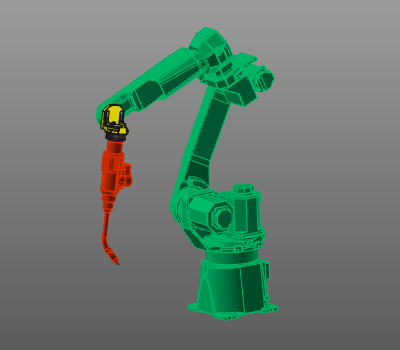
5.2 Validieren in 3D und Dashboards
Überprüfen Sie das Ergebnis in 3D und Dashboards.
Aktivieren Sie Anzeigefilter, um Qualitäts- und Werkzeugpfad-spezifische Informationen anzuzeigen.

6. Verhalten der Kollisionsvalidierung
Die Kollisionsvalidierung wird in den Bewertungskriterien angezeigt, aber die Aktivierung wird in der Simulations-Spielerleiste gesteuert.

Autonome Programmierung führt im Hintergrund immer eine Kollisionsanalyse durch, selbst wenn die Simulationsanzeige ausgeschaltet ist.