Generiere die Lichtbogenschweißprogramme
Zweck
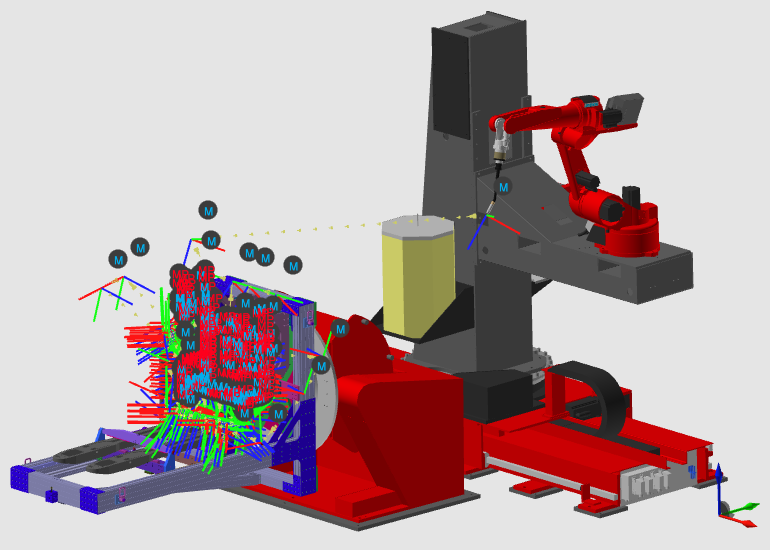
Nachdem die Workcell mit den zu verarbeitenden Teilen eingerichtet wurde, können die Schweißprogramme generiert, optimiert und simuliert werden.
Schritte
1. Zubereitung
1.1 Wechsle zur Offline-Programmierungsarbeitsbank, falls sie nicht bereits aktiv ist.
Wechsel zur OLP-Arbeitsbank
1.2 Verifizieren Sie die Projekteinrichtung vor der Berechnung.
Der Werkzeugrahmen sollte am Ende des Fülldrahts liegen. Der Basisrahmen des Roboterprogramms bei Crown wird üblicherweise oben und in der Mitte des aktiven Teilpositionierers platziert. Und schließlich muss die Lichtbogenschweißtechnologie spezifiziert werden.
Set-Operations-Standardeinstellungen
1.3 Setze Standard-Schweißparameter für neue Operationen.
Typische Standardwerte sind Arbeitswinkel, Bewegungswinkel und Schweißgeschwindigkeit. Man kann die Parameter später bei einzelnen Nähten noch anpassen.
Set-Operations-Standardeinstellungen
2. Generiere die Prozessgeometrie
2.1 Erstelle Prozessgeometrie für das Schweißen von Nähten, falls sie nicht in Schritt 2 erstellt wurde.
Prozessgeometrie erstellen
3. Berechnen Sie den Werkzeugpfad
Plane die möglichen Gruppen von Schweißnähten.
Kriterien zur anfänglichen Gruppierung der Nähte sind:
- Erwartete ähnliche Positionieranordnung (Werkstück und Roboter).
- Kontinuierliche Bewegung des Roboters (Konfiguration und Drehungen).
- Ähnliche Schweißrichtungen.
Dann wird der programmierte Werkzeugweg intelligent sequenziert und organisiert, um unnötige Roboterbewegungen zu reduzieren, Nähte in derselben Richtung und Ausrichtung zu bearbeiten und eine hohe Anzahl von Umpositionierungen des Werkstücks zu vermeiden.
3.1 Erzeugen Sie Werkzeugpfade, indem jeder Operationsgruppe eine oder mehrere Nähte zugewiesen werden.
Wiederhole das, bis alle Schweißnähte zugewiesen sind.
Erzeugen Sie Werkzeugpfade
3.2 Geben Sie klaren Namen für Operationsgruppen und einzelne Operationen.
Programmstruktur
4. Organisieren Sie die Operationsgruppen
4.1 Ordnen die Operationen innerhalb jeder Gruppe für eine sanfte Roboterbewegung um.
Programmstruktur
5. Optimierung der Operationsgruppe
Überprüfen und optimieren Sie die Erreichbarkeit einer einzelnen Arbeitsgruppe und stellen Sie sicher, dass alle Werkzeugbahnpunkte Ihres Schweißprogramms bezüglich des externen Achsenroboters und des Werkstückpositionierers erreichbar sind.
5.1 Bewegen Sie die äußeren Achsen des Roboters in die Nähe der gewünschten Schweißpositionen.
Zuerst bewege die Außenachse des Roboter-Positionierers (7, 8 und 9) nahe an die gewünschten Schweißpositionen.
Externe Achsen lehren
5.2 Bewegen Sie den Werkstück-Positionierer, um die Erreichbarkeit jeder Naht sicherzustellen.
Dann bewegt man den Werkstück-Positionierer (10+11 oder 12+13), um die Erreichbarkeit jeder Naht innerhalb der Gruppe sicherzustellen (Roboter schnappt an der Schweißpistole). Dies gilt nicht, wenn eine Schweißnaht eine Außenachsenbewegung erfordert
Externe Achsen lehren
5.3 Ordnung der Operationsgruppensequenz oder -inhalte bei Bedarf neu organisieren.
Die Sequenz und/oder der Inhalt der Operationsgruppen nach Anfangskriterien neu zu organisieren, falls erforderlich.
Programmstruktur
5.4 Überprüfe jede Operation und passe sie bei Bedarf an.
Wählen Sie jede Operation innerhalb der Gruppe aus. Passen Sie bei Bedarf die folgende Aktivität an und gehen Sie den Schritt durch.
Programmstruktur
5.5 Stellen Sie die Roboterkonfiguration und Kurven ein, vorzugsweise zu Beginn jeder Operation.
Roboterkonfiguration lehren
5.6 Führe eine Teilsimulation durch, um die aktuellen Ergebnisse zu validieren.
Führe eine partielle Simulation aus
6. Optimieren Sie die einzelnen Operationen
Optimieren Sie die einzelnen Operationen. Vermeiden Sie Kollisionen und erzielen Sie sanftere und kurze Roboterbewegungen.
Ändere Punkte bei Bedarf, aber minimiere die Anzahl der modifizierten Werkzeugwegelemente. Modifizierte Werkzeugpfadelemente werden fest und werden nicht mehr von Technologieattribut-Updates beeinflusst.
6.1 Lösen Sie Kollisionen, indem Sie den Bewegungswinkel am Nahtanfang oder -ende anpassen.
Wenn es zu einer Kollision zwischen der Schweißkanone und dem Schweißteil kommt, ändern Sie den Bewegungswinkel am Anfang und/oder Ende der Naht.
Verändern Sie die Position des Schweißwegs
6.2 Verwenden Sie bei Bedarf eine externe Achseninterpolation für lange Nähte.
Bei Bedarf aufgrund langer Schweißnähte verwenden Sie die externe Achseninterpolation, um diese Achsen mit der Bewegung des Roboters zu synchronisieren.
Roboterkonfiguration lehren
6.3 Führe eine weitere Teilsimulation aus, um Updates zu validieren.
Spiele eine Teilsimulation, um das bisherige Ergebnis zu validieren
Führe eine partielle Simulation aus
7. Überprüfen Sie den kollisionsfreien Werkzeugpfad
Definieren Sie die kollisionsfreie Reise zwischen einzelnen Operationen und zwischen den Operationsgruppen, indem Sie zusätzlichen Werkzeugweg über Punkte einfügen.
7.1 Erweitern Sie die Annäherungsbewegungen, indem Sie Werkzeugwegelemente vor bestehenden Punkten einfügen.
Punkte vorher einfügen
7.2 Verlängern Sie die Rückzugsbewegungen, indem Sie Werkzeugpfadelemente nach bestehenden Punkten einfügen.
Punkte danach einfügen
7.3 Zusätzliche hinzufügenüber Punkte, wo nötig, um Übergänge kollisionsfrei zu halten.
7.4 Führe eine Teilsimulation aus, um Übergänge zu validieren.
Führe eine partielle Simulation aus
8. Simulation
8.1 Simuliere das vollständige Schweißprogramm.
Führen Sie eine vollständige Simulation aus
9. Optimierung des Programms
Optimieren Sie das Programm, indem Sie die vorherigen Schritte 4 bis 8 wiederholen.
Nächster Schritt
→ [Laden Sie die OLP-Programme herunter(./raw-crown-1-step5)