#3 - Richte das Pick & Place-Projekt ein
Richte das Pick-and-Place-Projekt ein
Zweck
Richte das Kommissionier-und-Platz-Projekt ein, indem du die Werkstattumgebung mit dem Handling-Roboter und der benötigten Ausrüstung baust und dann das Werkstück wie im echten Produktionssetup beladest.
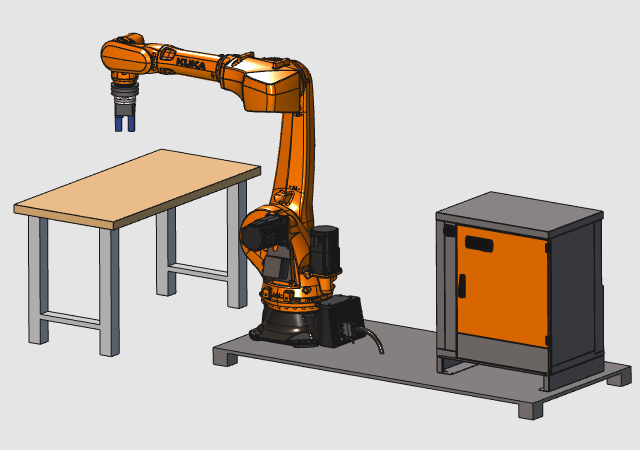
Das Layout besteht aus Standardausrüstung wie dem Fahrroboter. Komponenten werden positioniert und verbunden, um die Arbeitszelle zu vervollständigen, und das Werkstück wird anschließend auf den Tisch geladen.
Schritte
1. Vorbereitung (falls nötig)
Je nach verwendetem Lizenzpaket kannst du entweder im Layout Builder oder in Offline-Programmierung für die Setup-Sequenz arbeiten.
1.1 Wechsel zur Layout Builder-Werkbank
Wechsel zur LB-Werkbank
1.2 Wechsel zur Offline-Programmierungs-Werkbank
Wechsel zur OLP-Arbeitsbank
1.3 Erstelle ein neues leeres Dokument
Erstelle vor dem Erstellen der WorkCell ein neues, leeres Dokument. Wenn ein anderes Dokument geöffnet ist, entscheiden Sie, ob Sie es speichern, ohne speichern schließen oder abbrechen.
Erstellen Sie ein neues Dokument
2. Baue die Arbeitszelle
2.1 Wechsel zum Drag-&-Schnapp-Betriebsmodus
Beim Wechsel der Werkbank steht der Betriebsmodus standardmäßig auf Normal. In der Offline-Programmierung wechseln Sie zu Drag & Snap, um Komponenten in der Vorrichtungsbaugruppe zu bewegen.
Setze den Drag & Snap-Modus ein
2.2 Komponenten zum Layout hinzufügen
Öffne die Projektstruktur und füge Tabelle, Roboter, Adapter, Sockel und Controller aus den Trainingsdaten hinzu.
Zum Layout hinzufügen
2.3 Platziere Komponenten im Layout
Positioniere Komponenten mithilfe von Adaptern oder expliziten Koordinaten. Der Tisch sollte bei X=1800, Y=-950 und Z=0 stehen.
Platzkomponenten
2.4 Laden und montieren Sie den Greifer
Lade den zuvor erstellten Gripper und verbinde ihn mit dem Roboter.
Hinzufügen und Montage des Grippers
2.5 Elektrische Verbindung bauen
Stellen Sie die elektrische Verbindung zwischen dem Controller und dem Roboter her.
Elektrische Verbindung bauen
3. Speichere das Layout
3.1 Überprüfe die Werkbank vor dem Speichern
Bei Offline-Programmierung kann man ein Layout nicht speichern. Wechsle vor dem Speichern zur Werkbank des Layout Builders.
3.2 Speichere das Layout
Speichere das Layout-Dokument. Sie enthält die Ausrüstung, Ressourcen und Steuerungen auf dem Werkstattboden.
Layout speichern
Nächster Schritt
-> [Generiere das Pick-and-Place-Programm(./material-handling-pand-p1-step4)