Programmiere eine Einpunkt-Operation
Zweck
Programmieren Sie die Annäherungsfunktion des Reinigungsgeräts mittels manueller Lehrbefehle und Simulation.
Die Anfangspositionen werden eingefügt und verfeinert, damit die erste Operation simuliert und validiert werden kann.
Schritte
1. Zubereitung
1.1 Wechsel zur Offline-Programmierungswerkbank
Wechsel zur OLP-Arbeitsbank
2. Einheitsaufbau
2.1 Überprüfe die Sprühtechnologie für den Roboter
Set-Technologie
2.2 Erstellen und platzieren Sie einen neuen Basisrahmen
Erstelle einen neuen Basisrahmen auf dem Werkstückträger, um den Ursprungspunkt für das Programm zu definieren.
Basisrahmen erstellen
2.3 Umbenennung des Basisrahmens
Umbenennen des Basisrahmens
2.4 Setze den Basisframe aktiv
Basisrahmen aktivieren
3. Programmieren Sie den Werkzeugweg
3.1 Unterrichte die erste Heimposition
Erstelle die erste Heimatposition mit einfacher Lehre. Ein neues Roboterprogramm wird automatisch erstellt.
Programmiere eine Operation
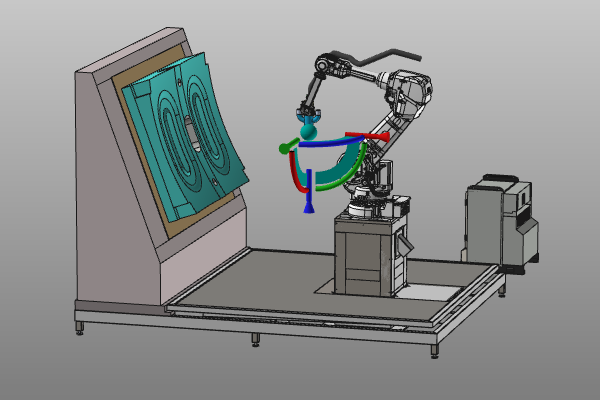
3.2 Positionen ändern oder einfügen
Wählen Sie das Achsensystem des Werkzeugwegelements und passen Sie die Positionen an. Der Punkt ist aktiv, wenn die zentrale Kugel des Manipulators blau wird.
Position hinzufügen oder verändern
3.3 Simuliere die Operation
Programm simulieren
3.4 Entferne unnötige Positionen
Bearbeitungs-Operationspunkte
3.5 Teach Panel für Gelenk- und Konfigurationsänderungen verwenden
Änderungen im Teach-Panel aktualisieren den berechneten Werkzeugpfad direkt.
Werkzeugwegwerte verfeinern
4. Rettet das Projekt
4.1 Speichere die Projektdatei
Speichern des Projekts
Nächster Schritt
-> Programmieren Sie die Oberflächenoperation