#2 - Kartierung der Hafensignale
Kartiere die Hinterbordsignale
Zweck
Verwenden Sie die Layout Builder Werkbank, um die Signalkommunikation zwischen dem Controller und den Ressourcen zu definieren.
Elektrische Verbindungen zwischen Ressourcen und Controller werden verwendet, um automatisch Signale an die Controller-Ports zuzuweisen.
Schritte
1. Zubereitung
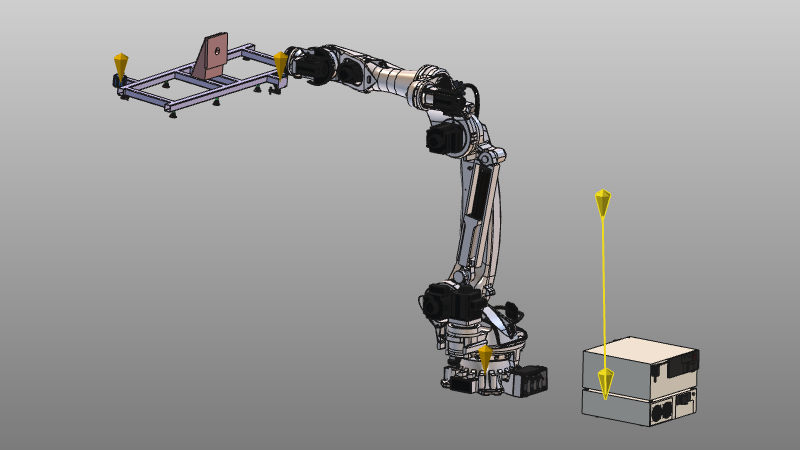
1.1 Wechsel zur Layout Builder-Werkbank
Wechsel zum Layout-Builder
![]()
2. Kartieren Sie die Signalanschlüsse
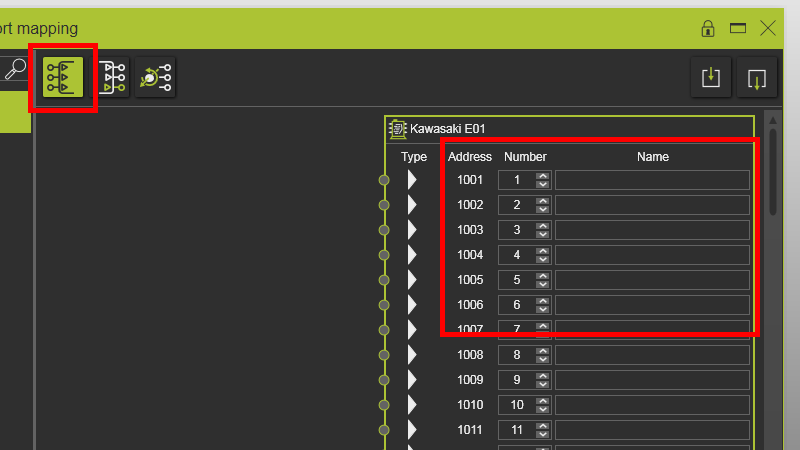
2.1 Open-Port-Mapping-Dashboard
Öffnen Sie das Port-Mapping-Dashboard in der Symbolleiste auf der rechten Seite der 3D-Ansicht.
Port-Mapping
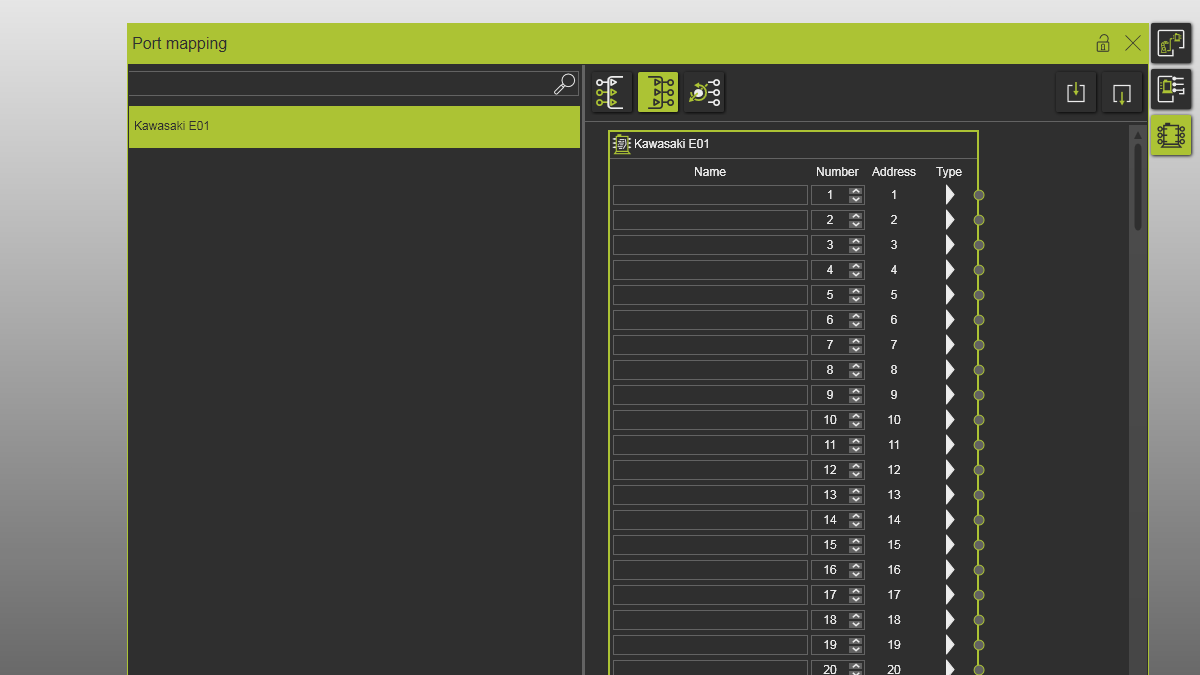
2.2 Überprüfen Sie leere Logik-Outport-Namen
Überprüfen Sie, dass die Namen der Logik-Ausporte leer sind, bevor Sie elektrische Verbindungen herstellen.
Port-Mapping
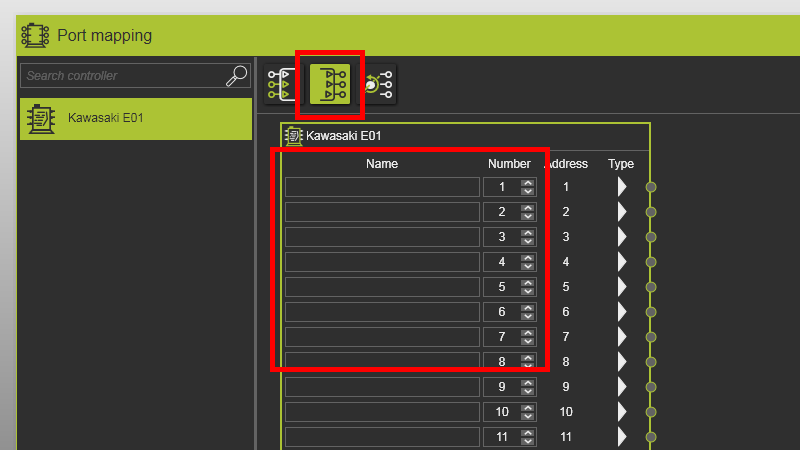
2.3 Überprüfen Sie leere Logik-In-Port-Namen
Überprüfen Sie, ob die Logik-In-Port-Namen leer sind, bevor Sie elektrische Verbindungen herstellen.
Port-Mapping
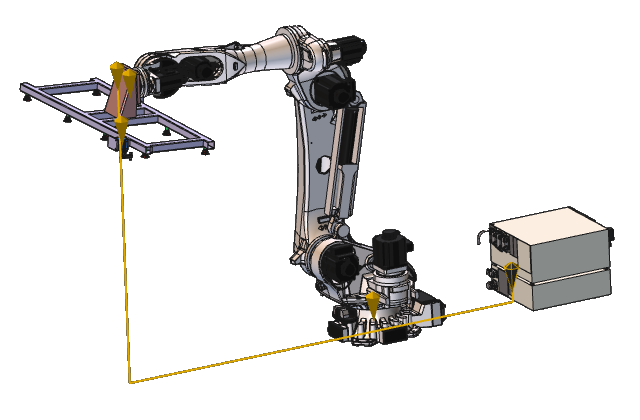
2.4 Elektrische Verbindung zwischen Greifer und Controller herstellen
Ziehe den elektrischen Adapter des Greifers zum Controller-Adapter.
Elektrische Verbindung herstellen
Es wird empfohlen, zuerst elektrische Verbindungen herzustellen, bevor mechanische Verbindungen abgerissen werden.
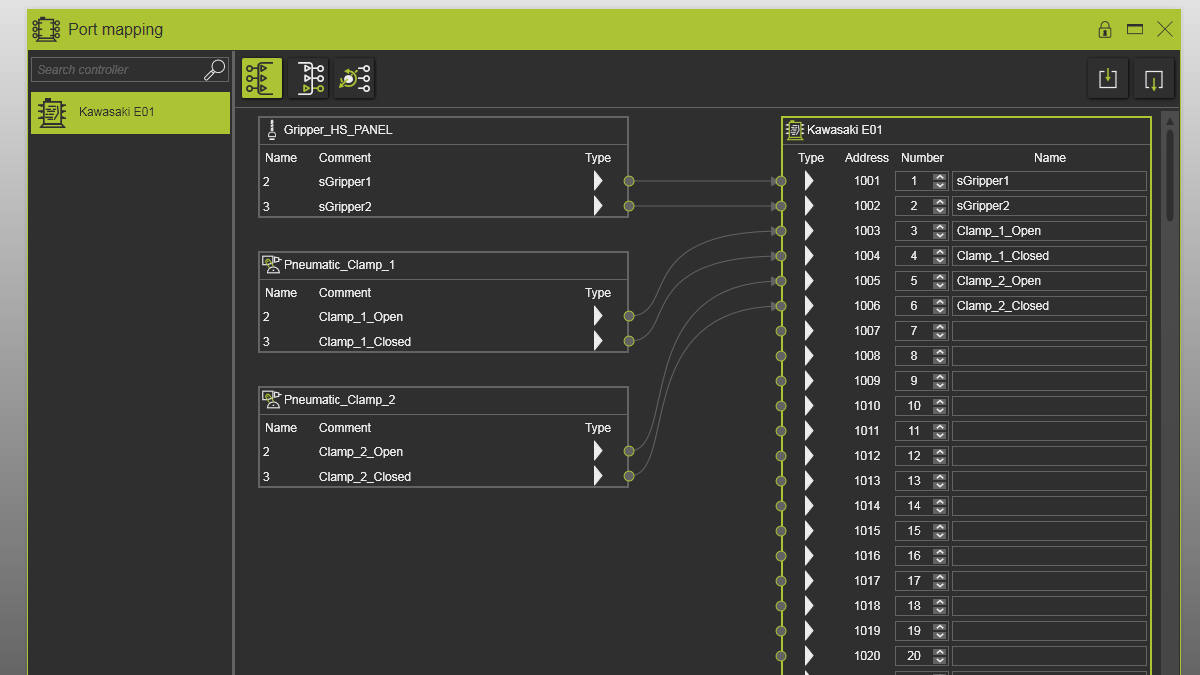
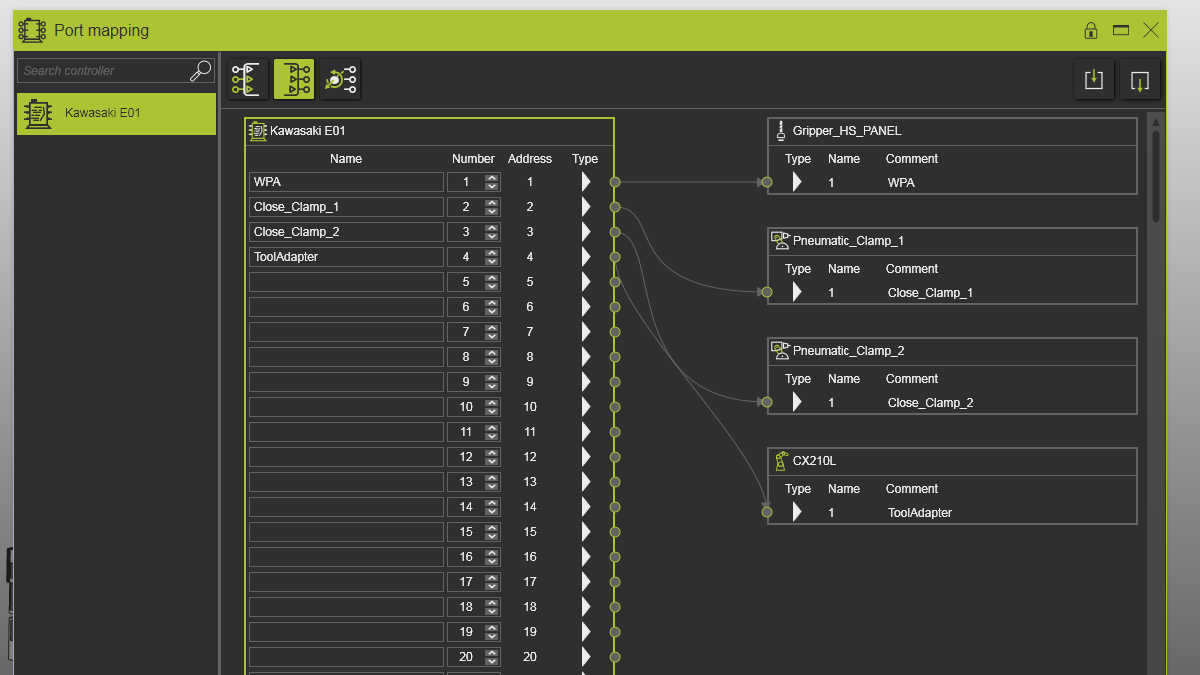
2.5 Automatische Signalzuweisung überprüfen
Überprüfen Sie, dass Gripper- und Controller-Signale automatisch verbunden sind und dass die Peripherieports auf die ersten freien Controller-Ports abgebildet sind.
Port-Mapping
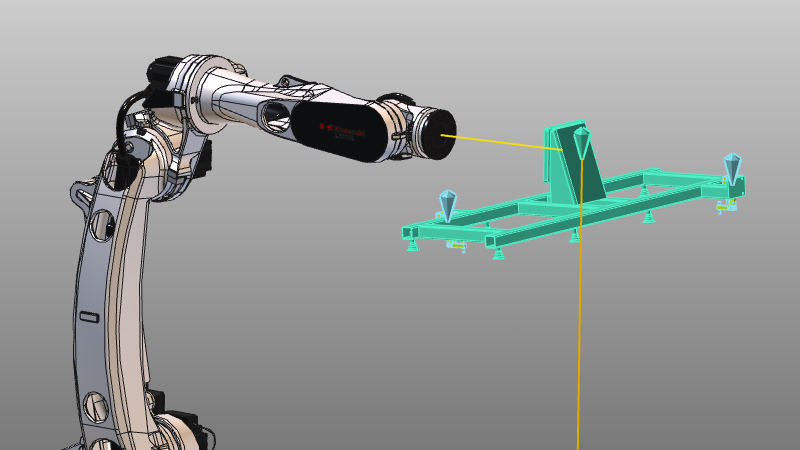
2.6 Mechanische Verbindung herstellen
Befestigen Sie den Greifer auf die Montageplatte des Roboters, um eine mechanische Verbindung herzustellen.
Port-Mapping
2.7 Logik-Outport-Mapping überprüfen
Überprüfen Sie, ob die logischen Ausgänge sowohl mit den Greifklemmen als auch mit dem Signal des Roboterwerkzeugadapters verbunden sind, das anzeigt, dass der Greifer montiert ist.
Port-Mapping
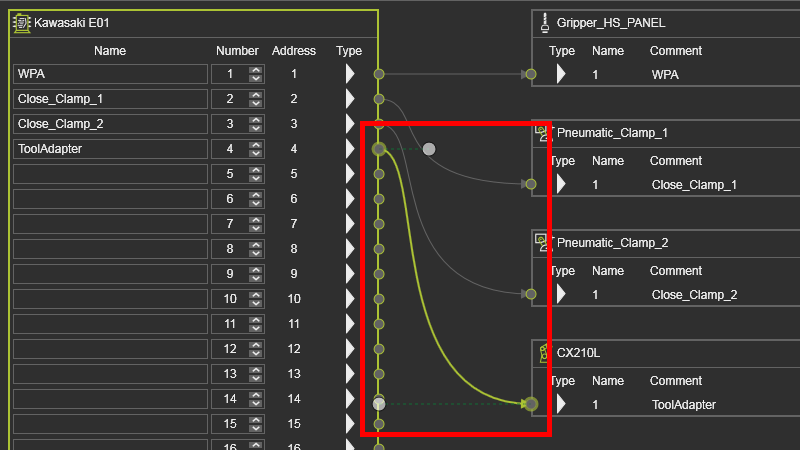
2.8 Verbindungsgrafiken anpassen
Wählen Sie eine Signalverbindung im Armaturenbrett aus und passen Sie die Krümmung mit den Start-/Endrichtungsgriffen an.
Port-Mapping
2.9 Gemeinsame Portzuordnung überprüfen
Überprüfen Sie, dass die Gelenkanschlüsse mit dem Roboter verbunden sind und dass die Portnamen mit den Gelenknamen übereinstimmen.
Port-Mapping
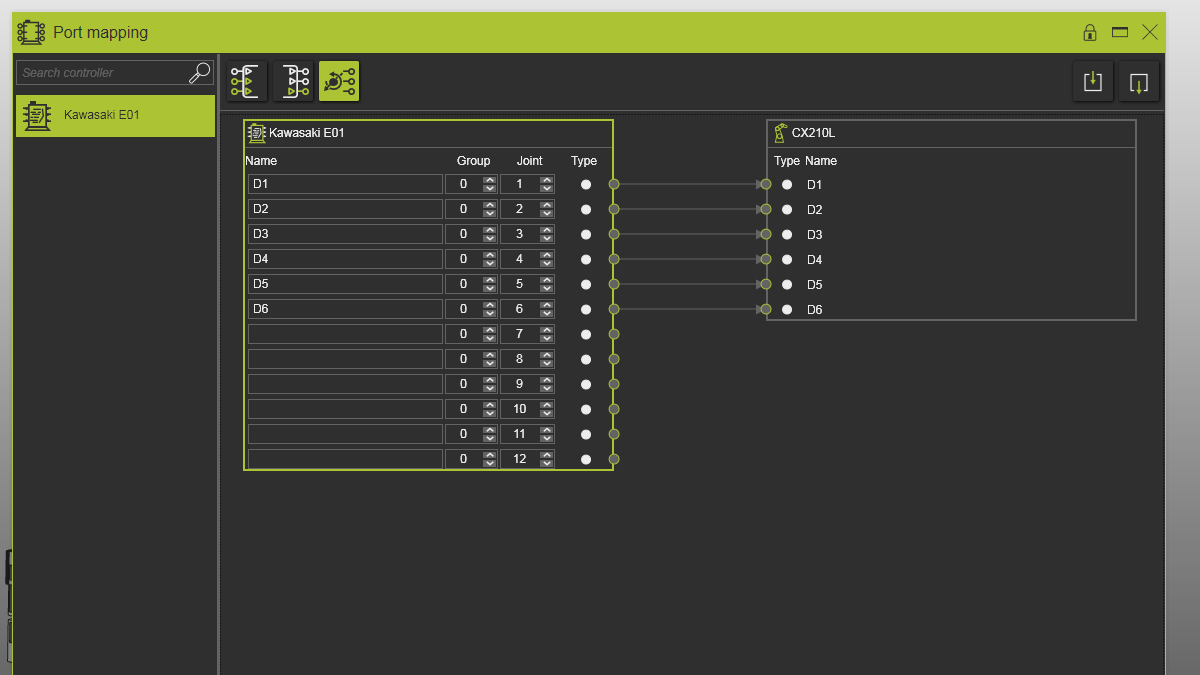
2.10 Setzen Sie gültigen Gruppenindex
Ein Gruppenindexwert von 0 ist ungültig. Ändere es auf 1 für den ersten verbundenen Roboter.
Port-Mapping

3. Speichern
3.1 Speichere die Anlage mit kartierten Signalen
Layout speichern