Was ist automatische Linkpfadgenerierung
Methodik
Die Funktion erzeugt komplexere Wege als eine direkte, gerade Verbindung zwischen den Operationen.
Die Funktion arbeitet auf bestehenden Werkzeugpfadstrukturen, wobei sie:
![]()
Erstellt bei Bedarf automatisch Linkpfade zwischen den Operationen.
![]()
Erstellt zusätzliche Positionen innerhalb des Operations-Linkpfads selbst.
Mit der Einschränkung oder Randbedingung, dass:
![]()
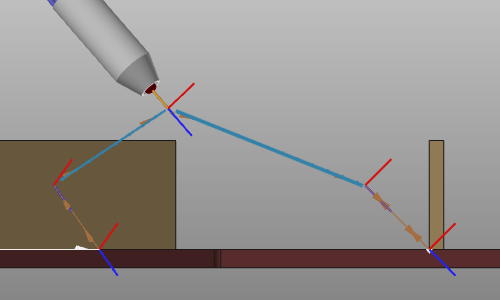
Die Rückzugspositionen der ersten Operation und die Anflugpositionen der zweiten Operation müssen kollisionsfrei sein, da der Generator diese Positionen nicht ändern kann.
Das untenstehende Bild zeigt schematisch die Lösung, die generiert werden soll.
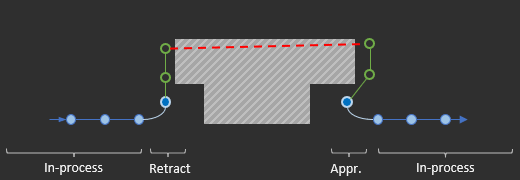 | 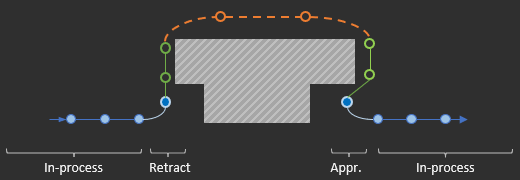 | |
| Vor | Nach |
Bedingungen
Technologiesystemkonfigurationen
Jede Technologie hat unterschiedliche Randbedingungen und Anforderungen. Verschiedene Roboter- oder Maschinentypen, ihre Konfiguration und Drehwerte (sofern zutreffend) sowie die bevorzugte Bewegung (PTP, Lin, …) sind von großer Bedeutung, um den richtigen und erwarteten Verbindungspfad zu berechnen. Unter Berücksichtigung dessen gibt es keine allgemeine Lösung, die nur auf der Werkstückgeometrie basiert. Für jeden Technologie- und Fertigungsszenario berechnet das System seine eigene spezifische Lösung.
Abhängigkeit von verknüpften Operationen
Die Operationen selbst, die über einen Linkpfad verbunden werden, können mit den verschiedenen verfügbaren Programmierfunktionen modifiziert oder optimiert werden. Es bedeutet, dass die automatische Linkpfadgenerierung diese Operationen während der Verbindung möglicherweise nicht verändert. Das bedeutet, dass:
![]()
Positionskoordinaten, Roboterkonfiguration und Wendewerte des letzten Prozesspunkts der Quelloperation und des ersten Prozesspunkts der Zieloperation werden beibehalten.
![]()
Es kann daher notwendig sein, die Konfiguration und Werte auf dem Verbindungspfad selbst zu ändern (abhängig von den Bewegungstypen).
![]()
Der Bewegungstyp des Zielpunkts wird geändert, wenn er nicht mit der verwendeten Linkstrategie übereinstimmt. Derzeit werden nur PTP-Bewegungen für das Verknüpfen verwendet.
Äußere Achsen
Werte der äußeren Achsen werden in die Berechnung der Verbindungspfade einbezogen. Die Achsenwerte am letzten Prozesspunkt der Quelloperation und am ersten Prozesspunkt der Zieloperation werden gehalten. Selbst wenn diese modal und nicht explizit angegeben sind, bleibt der dort angewandte Wert erhalten.
Manuelle Modifikationen
Mit der Funktionalität generierte Werkzeugwegpositionen sind manuell bearbeitbar.
![]()
Modifizierte Positionen bleiben fest und werden in diesem Zusammenhang nach dem Update mit dem Befehl nicht neu berechnet.
![]()
Zusätzliche Positionen können in den Verbindungspfad eingefügt werden.
Kosten für die Bewertung von Werkzeugpfaden
Die automatische Generierung des Verbindungspfads kann komplexere Bewegungswege zwischen den Verbindungsoperationen schaffen als zuvor, um das Hauptziel zu erreichen, kollisionsfrei zu laufen. Komplexere Bewegungen führen zwangsläufig zu höheren Kosten für die Bewertung des Werkzeugwegs, was wiederum zu einer fehlerhaften Validierung des Programms führen kann. Und obwohl die Bewertung des Werkzeugpfads für die Kriterien Kollision, Erreichbarkeit, Singularität und Achsengrenzenannäherung durchgeführt wird, wird der Verbindungspfad von der Kostenbestimmung ausgeschlossen, um eine steigende Kostenanzeige zu vermeiden.
Verknüpfungsoperation
Im Tech-Tab Operation linking des Active program-Dashboards können die Parameter des Linkpfads eingestellt werden.
Operationelle Verknüpfung
Die Attribute, um die Berechnung des Verbindungspfads zu steuern.
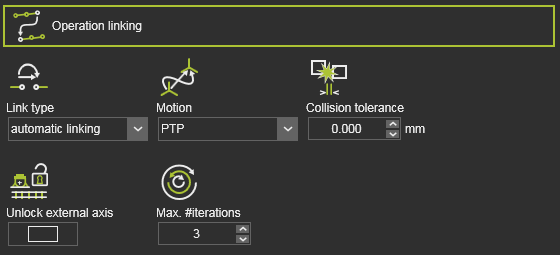
| Attribut | Beschreibung | Anmerkung |
|---|---|---|
| Linktyp | Der Typ des Verbindungspfades. | Um die automatische Erzeugung zu ermöglichen, muss der Typ auf automatische Verknüpfung eingestellt werden. |
| Motion | Der Bewegungstyp entlang des Weges. | |
| Kollisionstoleranz | Definiert den Sicherheitsabstand bei der Erzeugung des Verbindungspfads. | |
| (Im Expertenmodus angezeigt) | ||
| Externe Achse entsperren | Verwendung des gesamten Bereichs der äußeren Achsenwerte für die Erzeugung des Linkpfads. | Aus: Der Wert der äußeren Achse kann nur innerhalb des Intervalls geändert werden, das durch Start- und Endpunkt des Verbindungspfads angegeben ist. An: Die äußeren Achsenwerte sind innerhalb des gesamten Bereichs jeder Achse zu betrachten (d. h. sind freigeschaltet). |
| Max. #iterations | Definiert die maximale Anzahl der Iterationen, die der Wegfindungsalgorithmus ausführen kann. |
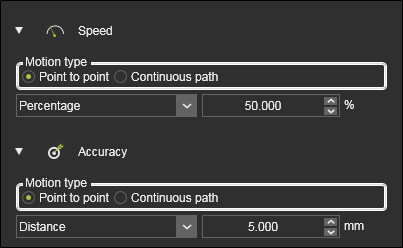
Verknüpfungsbewegung
Die Attribute zur Steuerung der Bewegung entlang des Verbindungspfads finden sich in diesem Container.
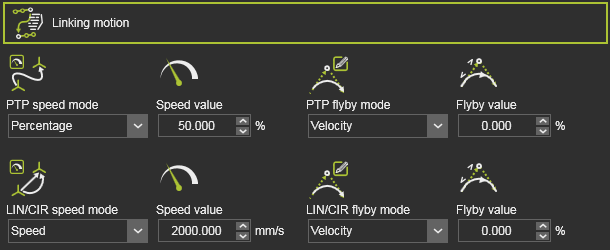
| Attribut | Beschreibung | Anmerkung |
|---|---|---|
| Geschwindigkeitsmodus | Die Bewegungsgeschwindigkeit. | Inherit: Kein zusätzliches Bewegungsereignis ist erforderlich. Die Bewegung erbt ihre Definition und ihren Wert von den globalen PTP-Bewegungseinstellungen. Geschwindigkeit: Die Bewegung ist als absoluter Geschwindigkeitswert definiert. Prozentsatz: Die Bewegung ist als Prozentsatz des maximalen TCP-Geschwindigkeitswerts der Ressource definiert. |
| Geschwindigkeitswert | Der Geschwindigkeitswert der Bewegung. | |
| Flyby-Modus | Die Vorbeiflugbewegung, also die Genauigkeit, sich entlang der Verbindungspfadpositionen zu bewegen.  | Inheriting: Es ist kein zusätzliches Genauigkeitsereignis erforderlich. Die Genauigkeit des Vorbeiflugs übernimmt ihre Definition und ihren Wert von den globalen Einstellungen. Off: Ein Ereignis wird erstellt, das nicht an der Bahnposition vorbeifliegt. |
| Flyby-Wert | Der Wert der Flyby-Genauigkeit. |
Ereignisse werden an der ersten Position des Verbindungspfads definiert, aber nur, wenn das Attribut hier gesetzt wurde. Andernfalls erbt die Bewegung die Werte aus der bestehenden (globalen) Definition.