#2 - Schweißgewehr bauen
Baue die Schweißpistole
Zweck
Verwenden Sie die Resource Builder-Werkbank, um die Punktschweißpistole zu bauen und sie für Schweißarbeiten vorzubereiten.
Die Geometrie der Schweißpistole wird aus externen Dateien importiert und in eine Werkzeugressource umgewandelt. Die Ressource wird mit Kinematik, Parametern und TCP-Informationen ergänzt, sodass sie im Schweißprojekt verwendet werden kann.
Schritte
1. Zubereitung
1.1 Wechsel zur Resource Builder-Werkbank
Wechsel zur RB-Werkbank
1.2 Erstelle ein neues leeres Dokument (falls erforderlich)
Wenn bereits ein anderes Dokument in der laufenden Sitzung geöffnet ist, erstelle ein neues, leeres Dokument. Wenn kein Dokument geöffnet ist, kann dieser Schritt übersprungen werden.
Erstellen Sie ein neues Dokument
Öffnen Sie das Dateimenü und wählen Sie Neu. Wenn Sie aufgefordert werden, wählen Sie, ob Sie das aktuell geöffnete Dokument speichern, ohne zu speichern schließen oder abbrechen.
2. Definiere die Werkzeugressource
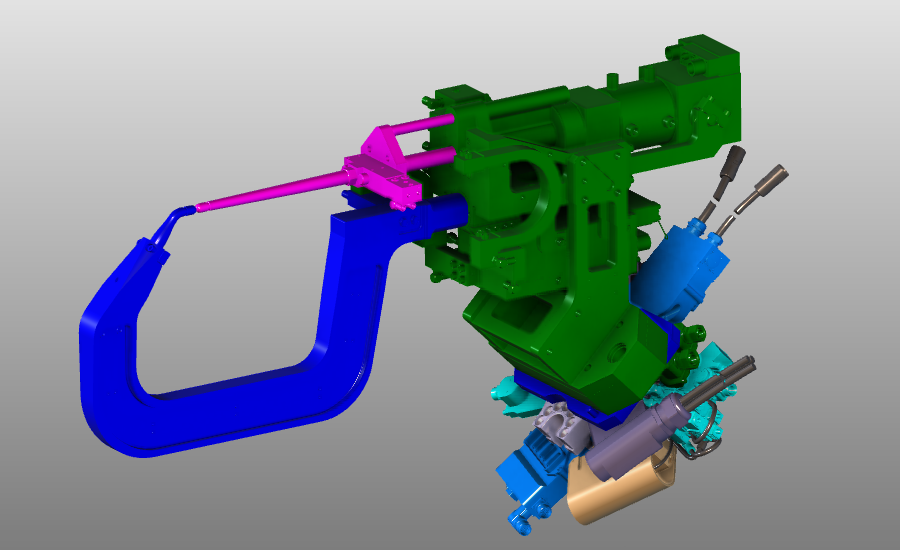
2.1 Import-Schweißwaffengeometrie
Importiere die Geometrien aus C-Type Weld Gun Spot Fix.cgr und C-Type Weld Gun Spot Mobile.cgr in den Trainingsdaten. Beide Dateien können zusammen importiert werden.
Importgeometrie
2.2 Eine Werkzeugressource für die Schweißpistole erstellen
Erstellen Sie eine Werkzeugressource
3. Bauen Sie die Form der Schweißpistole
3.1 Baue das kinematische Skelett
Baue das kinematische Skelett für die bewegliche Elektrode, damit die Waffe sich öffnen und schließen kann, während Spots programmiert werden.
Manipulator-Koordinaten:
| Axis | Wert |
|---|---|
| X | -25.000 |
| Y | -6.000 |
| Z | 665.000 |
| RX | 180.000 |
| RY | -45.000 |
| RZ | -165.000 |
Kinematische Skelett bauen
3.2 Befestigen Sie die bewegliche Elektrodengeometrie
Fügen Sie die bewegliche Elektrodengeometrie an das kinematische Gelenk an.
Geometrie anhängen
3.3 Statische Elektrode und Geschützkörper befestigen
Befestigen Sie die statische Elektrode und den Körper der Waffe am Ressourcenwurzelrahmen.
Statische Geometrie anhängen
3.4 Zeige alle angehängten Geometrien
Showgeometrie
4. Definieren Sie die Eigenschaften der Schweißpistole
4.1 Nenne die Waffe und setze kinematische Grenzen
Setkinematische Grenzwerte
4.2 Definiere Heimpositionen
Definiere Hauspositionen
4.3 Erstellen Sie den TCP-Werkzeugrahmen
Erstelle einen Werkzeugrahmen an der statischen Elektrode, der während der Programmierung als aktuelles TCP verwendet wird.
Manipulator-Koordinaten:
| Axis | Wert |
|---|---|
| X | 260.270 |
| Y | 69.653 |
| Z | 959.167 |
| RX | 178.225 |
| RY | -44.972 |
| RZ | -162.490 |
Definiere Rahmen und Adapter
5. Rettet die Schweißpistole
5.1 Rette die fertige Schweißpistole
Rette die Ressource
Nächster Schritt
-> Das Punktschweißprojekt einrichten