Was ist automatische Prozesspfadoptimierung
Methodik
Die Funktion verwendet eine Methodik iterativer Schritte, um das optimale Ergebnis zu finden. Diese iterativen Schritte werden auf eine Menge von Variablen angewendet, d. h. Orientierungswinkel der Werkzeugwegelemente, die während der Optimierung modifiziert werden können.
In jedem Iterationsschritt wird ein Bereich mit mehreren Variationen aufgebaut, um das optimale Ergebnis (= minimale Kosten) innerhalb dieses Bereichs zu finden. Aus diesem Optimum wird ein neuer Bereich definiert, von der vorherigen Variation bis zur Variation nach dem gefundenen Optimum. Dieser Bereich wird wiederum in kleinere Schritte unterteilt, um erneut nach dem Optimum zu suchen.
Dieser Prozess wiederholt sich, bis der Variationsschritt dem Diskretisierungsschritt der Variablen entspricht (oder kleiner ist als) oder wenn eine andere Randbedingung erfüllt ist.
Dieser Prozess wird für jede der Variablen ausgeführt. Aber jede dieser Variablen könnte eine unterschiedliche optimale Ausrichtung der Werkzeugwegposition liefern. Daher ist die resultierende optimierte Werkzeugwegposition ein Kompromiss zwischen den Ergebnissen der einzelnen Variablen.
Am Ende bewertet die automatisierte Pfadoptimierung (APO) den gesamten Werkzeugpfad; d. h. der Bereich (Programm, Gruppe oder Operation), der ausgewählt wurde, und versucht, eine optimierte Lösung zu finden, die den gegebenen Qualitätskriterien entspricht und dann zu minimalen Kosten führt.

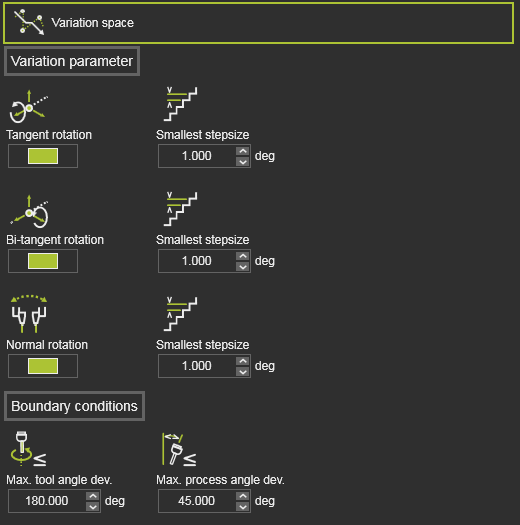
Variationsraum
| Standardmäßig werden nicht alle Attribute angezeigt. Es beschränkt sich auf die gebräuchlichsten Anwendungen. Das Umschalten des Expertenmodus-Buttons oben rechts im Dashboard erweitert den Container, um alle verfügbaren Attribute anzuzeigen. |
Der Variationsraum definiert, welche Änderungen an den Werkzeugpfadelementen vorgenommen werden können, um nach der optimalen Lösung zu suchen. Es zeigt alle Variablen, die in den Optimierungsprozess einbezogen werden können, deren Bereich innerhalb dieser Variablen variiert werden kann und der Verteilungsschritt oder die Diskretisierung innerhalb dieses Bereichs.
Für die meisten Technologien oder Szenarien sollten die Standardwerte des Variationsraums die Aufgabe erfüllen; Hier ändert sich nichts, wenn man mit der Bedeutung dieser Variablen nicht so vertraut ist.
Die Variablen hier könnten spezifisch für eine Technologie oder eine bestimmte Technologiekonfiguration in Kombination mit einem OEM-Controller und Roboter oder einer Maschine sein. Mit anderen Worten: Der genaue Inhalt des Behälters kann in jedem Fall unterschiedlich aussehen.
Die Variationsparameter beschreiben, welche Achse des Werkzeugwegelements modifiziert werden kann.
| Parameter | Beschreibung | Optimierungsoptionen | Anmerkung | Modus | |
|---|---|---|---|---|---|
| Tangentialrotation | Variiert die Position des Werkzeugwegs, während er ihn um die Tangentialrichtung dreht. | Wechsle, um es in den Optimierungsprozess einzubeziehen. | Experte | ||
| Bi-Tangentenrotation | Variiert die Position des Werkzeugwegs, während er ihn um seine bi-tangentische Richtung dreht. | Wechsle, um es in den Optimierungsprozess einzubeziehen. | Experte | ||
| Singularitätsorientierung | Bewertet Singularitätssituationen des Roboters oder der Maschine. Im Fall eines Roboterszenarios bedeutet die Singularitätsorientierung die Rotation der Position des Werkzeugwegs um seine Normalachse. | Wechsle, um es in den Optimierungsprozess einzubeziehen. | Experte | ||
| Normale Rotation (Lichtbogenschweißtechnologie) | Variiert die Position des Werkzeugwegs, während er ihn um seine Normalrichtung dreht. | Wechsle, um es in den Optimierungsprozess einzubeziehen. | Experte |
Der Abschnitt Randbedingungen enthält zusätzliche Parameter, die eingeführt werden können, um die Anzahl der Variationen zu begrenzen. Wo normalerweise die Tangential- und Bi-Tangential-Rotation der Werkzeugbahnposition zwischen -180 und +180 Grad variieren kann, verursachen diese Parameter zusätzliche Bedingungen, sodass die Tangential- und Bi-Tangente-Achse nur innerhalb des Bereichs und solange die Randbedingung erfüllt ist, rotieren können.
| Parameter | Beschreibung | Optimierungsoptionen | Anmerkung | |
|---|---|---|---|---|
| Max. Prozesswinkelabweichung | Die maximal erlaubte Abweichung des Prozesswinkels von der Referenzrichtung. | Ein Optimierungsergebnis wird akzeptiert, wenn der Prozesswinkel kleiner oder gleich diesem Wert ist. Dieser Wert kann nur dann bearbeitet werden, wenn das entsprechende Kriterium Prozesswinkelabweichung von der Qualitätsbewertung deaktiviert wurde. | ||
| Maximal Arbeitswinkelabweichung (Lichtbogenschweißtechnologie) | Das Maximum erlaubte eine Abweichung des Arbeitswinkels von der Referenzrichtung. | Nur dann verfügbar, wenn das Kriterium für die Abweichung des Prozesswinkels durch getrennte Arbeits- und Werkzeugwinkelkriterien ersetzt wurde. | ||
| Maximal Winkelabweichung (Lichtbogenschweißtechnologie) | Die maximal erlaubte Abweichung des Bewegungswinkels von der Referenzrichtung. | Nur dann verfügbar, wenn das Kriterium für die Abweichung des Prozesswinkels durch getrennte Arbeits- und Werkzeugwinkelkriterien ersetzt wurde. | ||
| Maximal Werkzeugwinkelabweichung (Lichtbogenschweißtechnologie) | Die maximal erlaubte Abweichung des Werkzeugwinkels von der Referenzrichtung. |
Optimierungssteuerung

| Standardmäßig werden nicht alle Attribute angezeigt. Es beschränkt sich auf die gebräuchlichsten Anwendungen. Das Umschalten des Expertenmodus-Buttons oben rechts im Dashboard erweitert den Container, um alle verfügbaren Attribute anzuzeigen. |
Die Optimierungssteuerung ist eine Reihe von Attributen zur Verwaltung des Optimierungsprozesses.
| Attribut | Beschreibung | Anmerkung | Modus | |
| -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- -------------------------------------------------------------------------------------------------------------------------- | -------------------------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ------ |
| 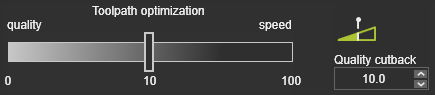 | Heuristischer Parameter zur Ausbalancierung zwischen bestes Ergebnis und schnellster Berechnungszeit. | Der Wert kann als Kostentoleranz pro Meter-Werkzeugweg interpretiert werden. Ein Wert von 0 würde das globale beste Ergebnis ergeben, also die niedrigsten Kosten, unabhängig von der erforderlichen Rechenzeit. Ein Wert von 1 würde bedeuten, dass selbst ein Werkzeugweg mit höheren Kosten bis zu 1 pro Meter im Durchschnitt als Optimierungsergebnis akzeptabel wäre, obwohl es bessere Ergebnisse mit niedrigeren Gesamtkosten geben würde. | | |
| || | | |
| Im Standard-Optimierungsprozess wird jede Position des Werkzeugwegs anhand der in den Simulationseinstellungen festgelegten Kollisionstoleranz analysiert. Wenn die anfängliche Position des Werkzeugwegs Kollisionen hat, neigt die Optimierung dazu, eine Lösung zu finden, die sehr nahe an dieser Kollisions- (oder Kollisionstoleranz) liegt, um die Kostenauswirkungen zu minimieren. Mit den folgenden Attributen kann eine zusätzliche kollisionsfreie Anforderung definiert werden. | | | | |
|
| Heuristischer Parameter zur Ausbalancierung zwischen bestes Ergebnis und schnellster Berechnungszeit. | Der Wert kann als Kostentoleranz pro Meter-Werkzeugweg interpretiert werden. Ein Wert von 0 würde das globale beste Ergebnis ergeben, also die niedrigsten Kosten, unabhängig von der erforderlichen Rechenzeit. Ein Wert von 1 würde bedeuten, dass selbst ein Werkzeugweg mit höheren Kosten bis zu 1 pro Meter im Durchschnitt als Optimierungsergebnis akzeptabel wäre, obwohl es bessere Ergebnisse mit niedrigeren Gesamtkosten geben würde. | | |
| || | | |
| Im Standard-Optimierungsprozess wird jede Position des Werkzeugwegs anhand der in den Simulationseinstellungen festgelegten Kollisionstoleranz analysiert. Wenn die anfängliche Position des Werkzeugwegs Kollisionen hat, neigt die Optimierung dazu, eine Lösung zu finden, die sehr nahe an dieser Kollisions- (oder Kollisionstoleranz) liegt, um die Kostenauswirkungen zu minimieren. Mit den folgenden Attributen kann eine zusätzliche kollisionsfreie Anforderung definiert werden. | | | | |
| ![]() | Wegstoßen | Aktiviert ein zusätzliches Optimierungskriterium mit dem Ziel, den Abstand zwischen möglichen kollidierenden Objekten zu erhöhen. | Sie wirkt als abstoßende Kraft, die versucht, den Abstand zwischen den Objekten zu erhöhen und gleichzeitig andere Zielkriterien zu berücksichtigen. | |
|
| Wegstoßen | Aktiviert ein zusätzliches Optimierungskriterium mit dem Ziel, den Abstand zwischen möglichen kollidierenden Objekten zu erhöhen. | Sie wirkt als abstoßende Kraft, die versucht, den Abstand zwischen den Objekten zu erhöhen und gleichzeitig andere Zielkriterien zu berücksichtigen. | |
| ![]() | Intensität | Die Stärke des Abstoßungseffekts. | Je nach Kosten anderer Zielkriterien kann ein gewisser Festigkeitsgrad unterschiedliche sichtbare Auswirkungen haben. | |
|
| Intensität | Die Stärke des Abstoßungseffekts. | Je nach Kosten anderer Zielkriterien kann ein gewisser Festigkeitsgrad unterschiedliche sichtbare Auswirkungen haben. | |
| ![]() | Sicherheitsfreigabe | Der minimale Winkelabstand zur Kollision sollte, wenn möglich, eingehalten werden. | Wenn der Sicherheitsabstand nicht eingehalten werden kann, werden auch Lösungen ausgewählt, die näher an der Kollision liegen. Ein Standardwert von 1 Grad wurde festgelegt. | Experte |
| | | | | |
|
| Sicherheitsfreigabe | Der minimale Winkelabstand zur Kollision sollte, wenn möglich, eingehalten werden. | Wenn der Sicherheitsabstand nicht eingehalten werden kann, werden auch Lösungen ausgewählt, die näher an der Kollision liegen. Ein Standardwert von 1 Grad wurde festgelegt. | Experte |
| | | | | |
| ![]() | Max. # Variationen | Teilt den Bereich in eine maximale Anzahl von Variationen, also Schrittweite.| | Experte |
|
| Max. # Variationen | Teilt den Bereich in eine maximale Anzahl von Variationen, also Schrittweite.| | Experte |
| ![]() | Max. Rotationsstufe | Der maximal erlaubte Rotationsschritt pro Variation der Roboter-/Maschinenachse. | | Experte |
|
| Max. Rotationsstufe | Der maximal erlaubte Rotationsschritt pro Variation der Roboter-/Maschinenachse. | | Experte |
| ![]() | Abbrechen, wenn keine Lösung kommt | Beendet die Optimierung. | Um unnötig lange Berechnungszeiten zu vermeiden, wird der Optimierungsprozess abgebrochen, wenn im ersten Iterationsschritt keine Lösung gefunden wurde. | Experte |
| | | | | |
| Wenn die Ressource eine begrenzte rotierende Achse hat, kann geschlossene Konturgeometrie je nach Startpunkt und Prozessrichtung zu Unwind-Situationen führen. | | | | |
|
| Abbrechen, wenn keine Lösung kommt | Beendet die Optimierung. | Um unnötig lange Berechnungszeiten zu vermeiden, wird der Optimierungsprozess abgebrochen, wenn im ersten Iterationsschritt keine Lösung gefunden wurde. | Experte |
| | | | | |
| Wenn die Ressource eine begrenzte rotierende Achse hat, kann geschlossene Konturgeometrie je nach Startpunkt und Prozessrichtung zu Unwind-Situationen führen. | | | | |
| ![]() | Verwenden Sie Zugvarianten | Vermeiden Sie Unwind-Situationen, indem Sie die richtigen Zugwerte für den ersten Prozesspunkt auswählen. | Begrenzt auf einen Zugwert unter und einen über dem Standard-Zugwert. Zugvarianten werden nicht berücksichtigt, wenn der Zugwert bereits für den ersten Prozesspunkt festgelegt ist. | Experte |
| | | | | |
| Die automatische Toolpath-Optimierung erstellt einen optimierten Toolpath basierend auf der Incident-Validierung an derlpath-Positionen und die Via-Punkte auf kreisförmigen Werkzeugpfadabschnitten. Es kann nicht verhindern, dass zwischen diesen Werkzeugbahnpositionen die Flugbahn dennoch auf ein Incidentproblem stößt, da die Flugbahn selbst nicht bewertet werden kann. Mit der Bewegungsprüfung der Daten des Werkzeugpfads kann der Algorithmus Zwischenpunkte zwischen den Positionen des Werkzeugwegs definieren und diese auf Zwischenfälle auswerten. Die Qualitätsbewertung dieser Zwischenpunkte beschränkt sich auf Zwischenfälle auf Kollision, Erreichbarkeit und Singularität. | | | | |
|
| Verwenden Sie Zugvarianten | Vermeiden Sie Unwind-Situationen, indem Sie die richtigen Zugwerte für den ersten Prozesspunkt auswählen. | Begrenzt auf einen Zugwert unter und einen über dem Standard-Zugwert. Zugvarianten werden nicht berücksichtigt, wenn der Zugwert bereits für den ersten Prozesspunkt festgelegt ist. | Experte |
| | | | | |
| Die automatische Toolpath-Optimierung erstellt einen optimierten Toolpath basierend auf der Incident-Validierung an derlpath-Positionen und die Via-Punkte auf kreisförmigen Werkzeugpfadabschnitten. Es kann nicht verhindern, dass zwischen diesen Werkzeugbahnpositionen die Flugbahn dennoch auf ein Incidentproblem stößt, da die Flugbahn selbst nicht bewertet werden kann. Mit der Bewegungsprüfung der Daten des Werkzeugpfads kann der Algorithmus Zwischenpunkte zwischen den Positionen des Werkzeugwegs definieren und diese auf Zwischenfälle auswerten. Die Qualitätsbewertung dieser Zwischenpunkte beschränkt sich auf Zwischenfälle auf Kollision, Erreichbarkeit und Singularität. | | | | |
| ![]() | Max. Entfernung | Der maximale kartesische Abstand zwischen zwei aufeinanderfolgenden Punkten ist zu prüfen. | | Experte |
|
| Max. Entfernung | Der maximale kartesische Abstand zwischen zwei aufeinanderfolgenden Punkten ist zu prüfen. | | Experte |
| ![]() | Max. Winkel | Der maximale Winkelabstand zwischen zwei aufeinanderfolgenden Punkten ist zu prüfen. | | Experte |
| | | | | |
| Die Qualität des Werkzeugwegs wird in Kosten gemessen. Vorfälle auf Werkzeugwegpositionen oder zwischen den Positionen erhöhen diese Kosten normalerweise. Die automatische Optimierung kann den Auswirkungsbereich dieser Vorfälle identifizieren. Wenn versucht wird, dieses Gebiet zu begrenzen, sinken die Kosten. Dies kann durch das Hinzufügen und Einfügen zusätzlicher Prozesspunkte auf dem Werkzeugweg um diese kritischen Bereiche erreicht werden. | | | | |
|
| Max. Winkel | Der maximale Winkelabstand zwischen zwei aufeinanderfolgenden Punkten ist zu prüfen. | | Experte |
| | | | | |
| Die Qualität des Werkzeugwegs wird in Kosten gemessen. Vorfälle auf Werkzeugwegpositionen oder zwischen den Positionen erhöhen diese Kosten normalerweise. Die automatische Optimierung kann den Auswirkungsbereich dieser Vorfälle identifizieren. Wenn versucht wird, dieses Gebiet zu begrenzen, sinken die Kosten. Dies kann durch das Hinzufügen und Einfügen zusätzlicher Prozesspunkte auf dem Werkzeugweg um diese kritischen Bereiche erreicht werden. | | | | |
| ![]() | Prozesspunkte einfügen | Schalte um, um das Einfügen zusätzlicher Prozesspunkte zu ermöglichen. | | |
|
| Prozesspunkte einfügen | Schalte um, um das Einfügen zusätzlicher Prozesspunkte zu ermöglichen. | | |
| ![]() | Mindestdistanz | Der minimale kartesische Abstand zwischen zwei Prozesspunkten. | Gemessen zwischen zwei eingefügten Prozesspunkten oder zwischen dem eingefügten Prozesspunkt und einem bestehenden. | Experte |
|
| Mindestdistanz | Der minimale kartesische Abstand zwischen zwei Prozesspunkten. | Gemessen zwischen zwei eingefügten Prozesspunkten oder zwischen dem eingefügten Prozesspunkt und einem bestehenden. | Experte |
| ![]() | Minimaler Distanzfaktor | Der Mindestabstand als Faktor der lokalen Prozessgeschwindigkeit. | Gemessen zwischen zwei eingefügten Prozesspunkten oder zwischen dem eingefügten Prozesspunkt und einem bestehenden. | Experte |
| | | | | |
| Minimaler Distanzfaktor | Der Mindestabstand als Faktor der lokalen Prozessgeschwindigkeit. | Gemessen zwischen zwei eingefügten Prozesspunkten oder zwischen dem eingefügten Prozesspunkt und einem bestehenden. | Experte |
| | | | | |
| Die eingefügten Prozesspunkte gehören zu den automatischen Optimierungsdaten. Das bedeutet, dass beim Ausführen einer weiteren Optimierung, dem Entfernen der Optimierungsdaten oder anderen Aspekten, die eine Neuberechnung des ursprünglichen Werkzeugpfads verursachen, diese eingefügten Prozesspunkte gelöscht werden. |