Tipps, Tricks und Einschränkungen
Einige Empfehlungen, Überlegungen und mögliche Aspekte, die man beim Arbeiten mit dem Operationslinkpfad beachten sollte.
Tipps
Überarbeitung des Link-Pfades. Linkpfadelemente, die von ALG erstellt werden, können manuell modifiziert werden. Mit Ausnahme der Bewegungstypen können alle Learn-Daten modifiziert werden. 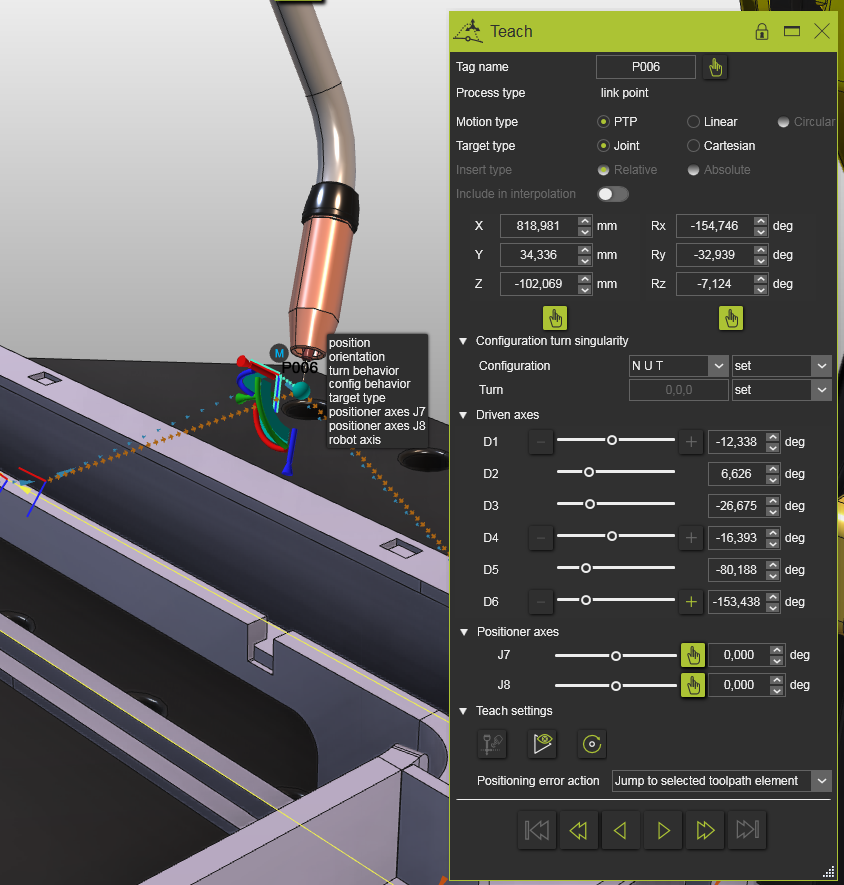 |
Entfernen eines mit dem ALG-Befehl generierten Operations-Linkpfads. Entferne einen einzelnen Linkpfad, indem du mit der rechten Maustaste auf den Linkpfad im Flussdiagramm klickst und den Befehl ‘Reset’ auswählst. 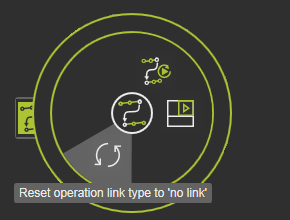 Entferne alle Linkpfade im Programm, indem du den Linktyp auf Keine Verbindung änderst. Entferne alle Linkpfade im Programm, indem du den Linktyp auf Keine Verbindung änderst. 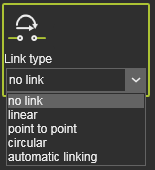 |
Wann sollte man die Link-Path-Generierung erneut ausführen? ALG sollte erneut ausgeführt werden, wenn im Programm etwas geändert wurde, das die Erstellung der Linkpfade beeinflusst. In solchen Fällen wird ein bereits erstellter Linkpfad im Toolpath-Dashboard als veraltet markiert. Das Symbol für den Optimierungsstatus ist ausgegraut. Führe ALG erneut für das gesamte Programm aus oder nur für die veraltete Linkpfad-Operation, um einen aktualisierten, sicheren Linkpfad zu erhalten. 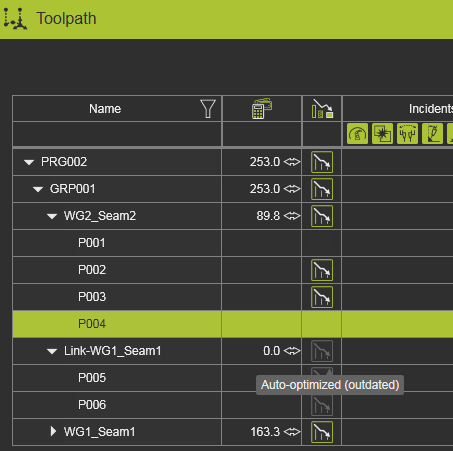 |
Mögliche Probleme
| Wenn der Befehl nicht verfügbar ist, ist die Premium-Lizenzkonfiguration, zu der ALG gehört, nicht verfügbar. ALG wurde für die verwendete Technologie noch nicht veröffentlicht. Die spezifische Maschinen- oder Roboterkinematik wird nicht unterstützt. |
| | |
| ------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| ![]() | Wenn der Befehl keinen Verbindungspfad erzeugt, könnten die Rückzugsposition der ersten Operation und die Annäherungsposition der zweiten Operation in Kollision geraten. Sie können vom Generator nicht verändert werden. Basierend auf der gegebenen parametrischen Konfiguration des ALG kann kein kollisionsfreier Weg gefunden werden (das würde mehr Zeit / Iterationen oder eine geringere Kollisionstoleranz erfordern …). Es gibt überhaupt keine Lösung.
| Wenn der Befehl keinen Verbindungspfad erzeugt, könnten die Rückzugsposition der ersten Operation und die Annäherungsposition der zweiten Operation in Kollision geraten. Sie können vom Generator nicht verändert werden. Basierend auf der gegebenen parametrischen Konfiguration des ALG kann kein kollisionsfreier Weg gefunden werden (das würde mehr Zeit / Iterationen oder eine geringere Kollisionstoleranz erfordern …). Es gibt überhaupt keine Lösung. 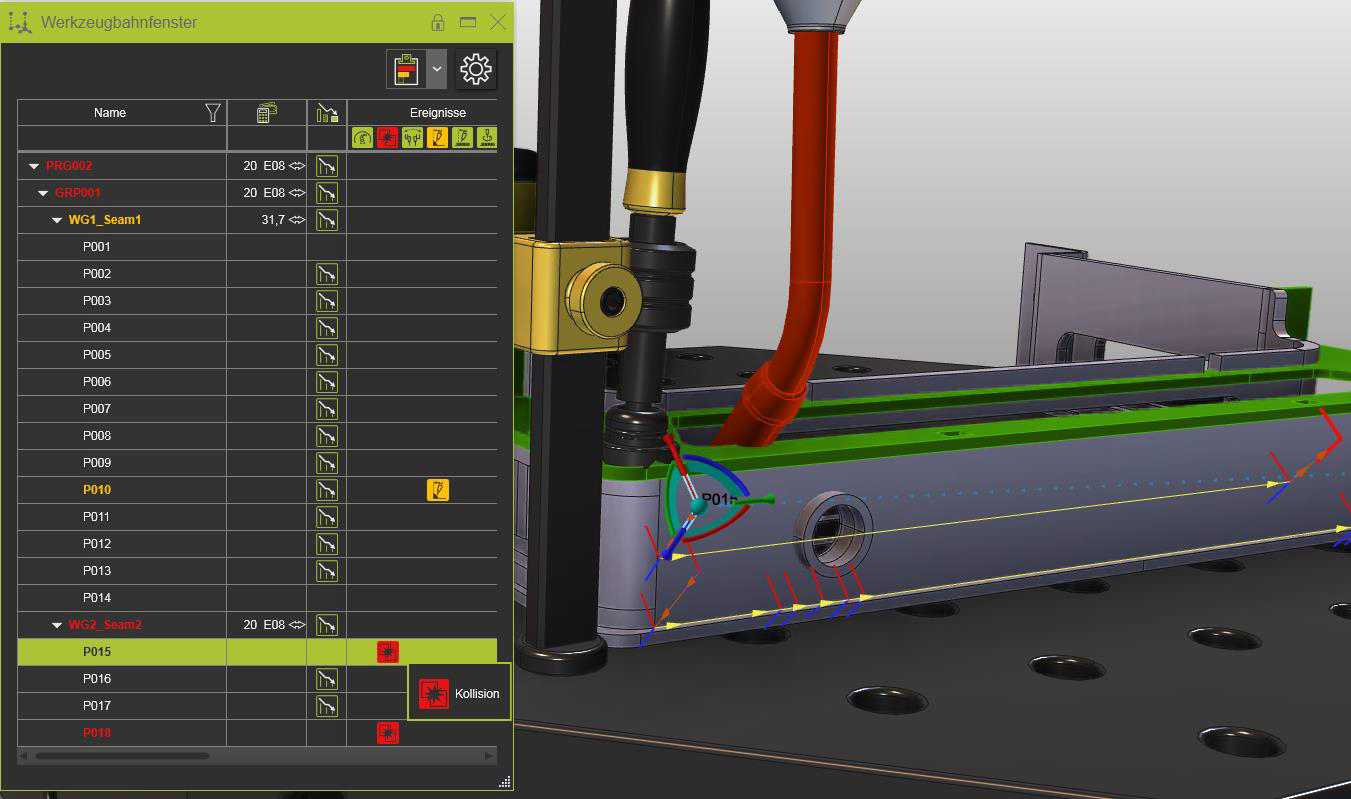 Mögliche Lösungen oder Workarounds: Machen Sie den Start- und Endpunkt des Verbindungspfads kollisionsfrei und erreichbar, bevor der ALG-Befehl ausgeführt wird. Erhöhe die Expertenattributwerte im Operation Linking-Container. Eine höhere Anzahl von ALG-Iterationen schafft einen besseren Verbindungspfad. Stellen Sie die Option “Externe Achse entsperren” auf AN um, um einen erweiterten Wertbereich der externen Achse zu nutzen.
Mögliche Lösungen oder Workarounds: Machen Sie den Start- und Endpunkt des Verbindungspfads kollisionsfrei und erreichbar, bevor der ALG-Befehl ausgeführt wird. Erhöhe die Expertenattributwerte im Operation Linking-Container. Eine höhere Anzahl von ALG-Iterationen schafft einen besseren Verbindungspfad. Stellen Sie die Option “Externe Achse entsperren” auf AN um, um einen erweiterten Wertbereich der externen Achse zu nutzen. 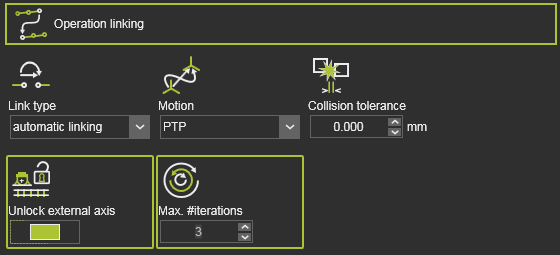 |
|
| ||
| ------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- ---------------------------------------------------------------------------------------------------------------------------- |
| ![]() | Wenn es während der Simulation nach einer erfolgreichen Erzeugung des Verbindungspfads noch Kollisionen gibt… Die Bewegung entlang des Verbindungspfads ist zu nah an der Geometrie. Die Erzeugung des Verbindungspfads berücksichtigt keine Vorbeiflugbewegung bei der Kollisionskontrolle. Die simulierte Bewegung mit Vorbeiflug kann sich leicht von den Bewegungsdaten in ALG unterscheiden, bei denen die genauen Koordinaten der Werkzeugwegposition verwendet werden und Kollisionen innerhalb der Vorbeiflugzonen verursachen. Mögliche Lösungen: Setzen oder erhöhen Sie den Wert der Kollisionstoleranz. Achten Sie darauf, keinen zu hohen Wert zu wählen, da dies verhindert, dass eine Lösung gefunden wird, wenn es nur zu Kollisionen kommt.
| Wenn es während der Simulation nach einer erfolgreichen Erzeugung des Verbindungspfads noch Kollisionen gibt… Die Bewegung entlang des Verbindungspfads ist zu nah an der Geometrie. Die Erzeugung des Verbindungspfads berücksichtigt keine Vorbeiflugbewegung bei der Kollisionskontrolle. Die simulierte Bewegung mit Vorbeiflug kann sich leicht von den Bewegungsdaten in ALG unterscheiden, bei denen die genauen Koordinaten der Werkzeugwegposition verwendet werden und Kollisionen innerhalb der Vorbeiflugzonen verursachen. Mögliche Lösungen: Setzen oder erhöhen Sie den Wert der Kollisionstoleranz. Achten Sie darauf, keinen zu hohen Wert zu wählen, da dies verhindert, dass eine Lösung gefunden wird, wenn es nur zu Kollisionen kommt. 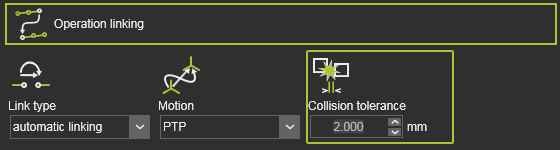 Überprüfen oder modifizieren Sie die Definition des Umflugs. Stelle den Flyby in einem beliebigen Einzugsabschnitt auf AUS.
Überprüfen oder modifizieren Sie die Definition des Umflugs. Stelle den Flyby in einem beliebigen Einzugsabschnitt auf AUS. 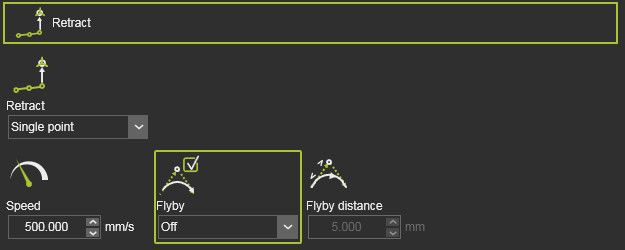 Stelle den Flyby für den Verbindungspfad auf AUS, falls das noch nicht erledigt ist.
Stelle den Flyby für den Verbindungspfad auf AUS, falls das noch nicht erledigt ist. 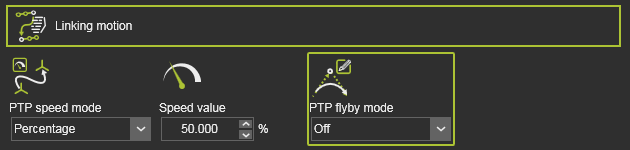 Wenn ein Vorbeiflug im Rückzug und/oder auf Verbindungspfaden benötigt wird, setzen Sie den Wert der Vorbeiflugentfernung auf das erforderliche Minimum. Manchmal wird sie unnötig hoch gesetzt.
Wenn ein Vorbeiflug im Rückzug und/oder auf Verbindungspfaden benötigt wird, setzen Sie den Wert der Vorbeiflugentfernung auf das erforderliche Minimum. Manchmal wird sie unnötig hoch gesetzt. 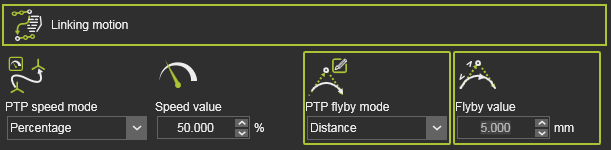 |
|
| | |
| ------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- --------------- |
| ![]() | Wenn der Verbindungspfad zu weit von der Geometrie (Werkstück) entfernt ist, verbessern Sie das Ergebnis des Verknüpfungspfads durch Anpassung der Expertenattribute. Eine höhere Anzahl von ALG-Iterationen erzeugt bessere Verbindungspfade, die näher am Werkstück liegen. Eine niedrigere Zahl lässt die ALG schneller laufen. Entsperre die Werte der äußeren Achse. Wenn er freigeschaltet ist, erzeugt der Algorithmus manchmal Pfadpositionen, die weiter entfernt sind. Wenn diese Option jedoch ausgeschaltet wird, findet der Generator in einigen Sonderfällen keine Lösung. |
| Wenn der Verbindungspfad zu weit von der Geometrie (Werkstück) entfernt ist, verbessern Sie das Ergebnis des Verknüpfungspfads durch Anpassung der Expertenattribute. Eine höhere Anzahl von ALG-Iterationen erzeugt bessere Verbindungspfade, die näher am Werkstück liegen. Eine niedrigere Zahl lässt die ALG schneller laufen. Entsperre die Werte der äußeren Achse. Wenn er freigeschaltet ist, erzeugt der Algorithmus manchmal Pfadpositionen, die weiter entfernt sind. Wenn diese Option jedoch ausgeschaltet wird, findet der Generator in einigen Sonderfällen keine Lösung. |
| Wenn die Berechnung länger läuft als erwartet: Der Hauptgrund dafür ist die Komplexität der Arbeitszelle und, damit zusammenhängend, ist der Rechenaufwand für die Kollisionserkennung während des ALG-Betriebs hoch. Lösungen / Workarounds: Vereinfachen Sie die Kollisionskontrolle. Prüfen Sie, ob einige der Kollisionsprüf-Beziehungen deaktiviert werden können oder ob Kollisionsgruppen vereinfacht oder vollständig entfernt werden können. |
Einschränkungen
Aktuelle funktionale Einschränkungen, die bei der Verwendung der automatischen Linkpfadgenerierung zu beachten sind.
| Verfügbar für folgende Technologien: Lichtbogenschweißen, Laserschweißen, Laserschneiden |
| Unterstützte Verbindungspfadbewegungstypen: PTP LIN Circular (CIR) oder kombinierte Bewegung wird nicht unterstützt. |
| Die automatische Generierung von Verbindungspfaden optimiert den Betriebsansatz und die Einzugspositionen nicht. Benutzer müssen sie manuell anpassen, um sie kollisionsfrei zu machen. |
| ||
| ------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
| ![]() | Da noch nicht alle Maschinen- oder Roboterkinematik unterstützt werden, ist der Befehl möglicherweise nicht in allen Fällen ausführbar. Unterstützte Kinematik: 5x Bearbeitung: Gantry-Head, Nutator (TTTRRhh) 6x Robotics Articulated (RRRRRR) Offset-Handgelenk (RRRRoRR, RRRRRoR) Anguliertes Handgelenk (RRRRRaR) 6x Portalkinematic (TTTRRR) PTP-Verbindungswege: Roboter mit mehr als 6 Achsen, einschließlich zusätzlicher externer Innenachse, z. B. 7-Achsen-Roboter (OTC, Fanuc, Kawasaki, KUKA) Nicht unterstützt: Bearbeitungstischkinematik (Kopftisch und Tischtisch) Robotik Doppelwinkel-Handgelenkkinematik mit Abhängigkeiten zwischen den Achsen innerhalb der Vorwärtskinematik, z. B. Parallelogramm zwischen Achse 2 und 3 Edition 2 generisch. Weitere spezielle Kinematik |
| Da noch nicht alle Maschinen- oder Roboterkinematik unterstützt werden, ist der Befehl möglicherweise nicht in allen Fällen ausführbar. Unterstützte Kinematik: 5x Bearbeitung: Gantry-Head, Nutator (TTTRRhh) 6x Robotics Articulated (RRRRRR) Offset-Handgelenk (RRRRoRR, RRRRRoR) Anguliertes Handgelenk (RRRRRaR) 6x Portalkinematic (TTTRRR) PTP-Verbindungswege: Roboter mit mehr als 6 Achsen, einschließlich zusätzlicher externer Innenachse, z. B. 7-Achsen-Roboter (OTC, Fanuc, Kawasaki, KUKA) Nicht unterstützt: Bearbeitungstischkinematik (Kopftisch und Tischtisch) Robotik Doppelwinkel-Handgelenkkinematik mit Abhängigkeiten zwischen den Achsen innerhalb der Vorwärtskinematik, z. B. Parallelogramm zwischen Achse 2 und 3 Edition 2 generisch. Weitere spezielle Kinematik |