Spezifikation
Zweck
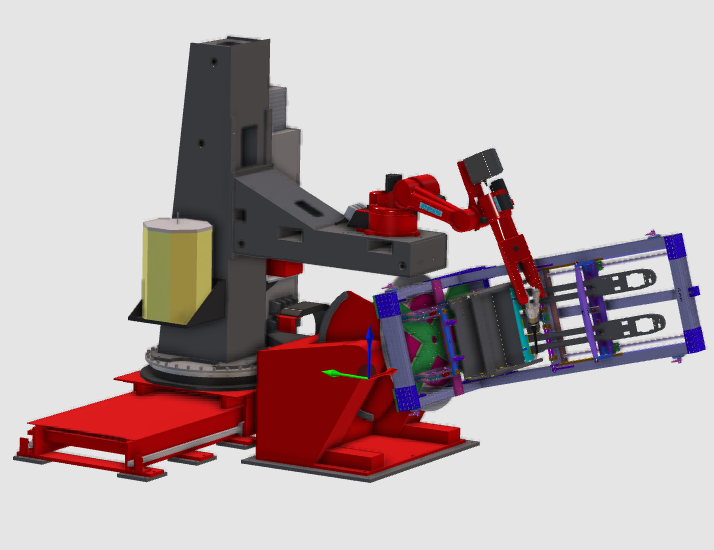
Diese Seite fasst die Konfiguration des Crown Robotic Arc Welding vor Beginn des Workflows zusammen.
Prozessprofil
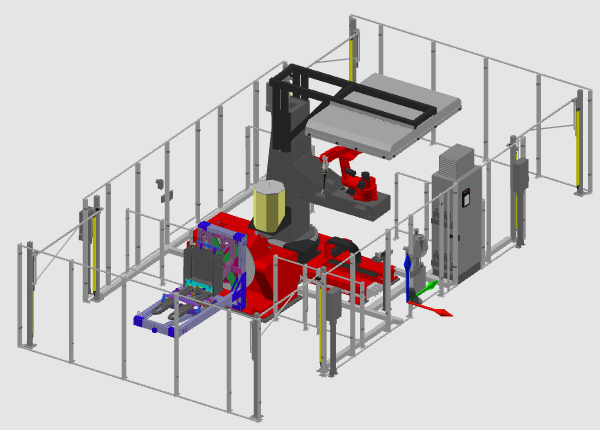
- Einzelne Robotereinheit
- Gerätetyp: Robotik
- Robotertyp: Standard 6-Achsen-Gelenk
- Teilpositionierer: 2-Achsen
- Roboter positioniert durch eine Schienen-Gantry-Einheit
- Einschichtiges Schweißen
Projektspezifikation
Kunde und Produkt
- Kunde: Crown Gabelstapler
- Produktpalette: Gabelstapler
Ausrüstung
- Roboter: Reis xxx
- Teilpositionierer: nicht spezifiziert
- Roboter-Positionierer: nicht spezifiziert
Prozessdetails
- Vorgeschweißte Teile mit gut zugänglichen Nähten
- Gut positionierte Teile
- Lange Schweißzeiten
Nächster Schritt
Was this page helpful?