#4 - Erstellen Sie das Pick-and-Place-Programm
Generiere das Pick-and-Place-Programm
Zweck
Nachdem Sie die WorkCell eingerichtet haben, erstellen Sie ein Basis-Pick-and-Place-Programm für das Teil.
Das Tutorial behandelt die Kernschritte, um Werkzeugpfade für Pick and Place zu erstellen, das Ergebnis zu simulieren, das Programm herunterzuladen und das Projekt zu speichern.
Schritte
1. Zubereitung
1.1 Wechsel zur Offline-Programmierungswerkbank
Wechsel zur OLP-Arbeitsbank
2. Das Projekt einrichten
2.1 Werkstück und Werkstückkasten hinzufügen
Füge das Werkstück und die Werkstückbox zum Projekt hinzu.
Zum Projekt hinzufügen
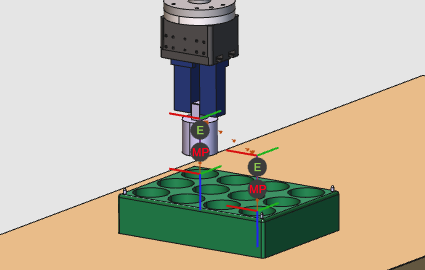
2.2 Setze den Zylinder in die Kiste
Wählen Sie den Drag & Snap-Modus, um den Zylinder in die Box zu legen.
Positionskomponenten
2.3 Kalibrieren und die Kiste auf den Tisch legen
Die Box hat drei Zentrierungsstifte zur Kalibrierung. Lade die Datei mit gemessenen Koordinaten aus den Trainingsdaten, kalibriere die Box auf der Tabelle und schalte dann zurück in den Drag & Snap-Modus, um sie zu positionieren.
Kalibrieren Sie die Box
2.4 Überprüfen Sie die Technologieeinstellungen
Überprüfe oder stelle die Technologie und ihre Eigenschaften ein.
Stellen Sie die Technologie ein
3. Programmieren Sie den Roboter
3.1 Erstelle die erste Operation (Pick)
Erzeuge die erste Operation, bei der der Roboter das Werkstück greift.
Programmiere eine Operation
3.2 Füge das Pick-Event hinzu
Simuliere die Operation und füge dann an der untersten Position ein Ereignis hinzu, um das Werkstück zu greifen.
Add Pick Event
3.3 Erstelle die zweite Operation (Platz)
Erstellen Sie die zweite Operation, bei der das Werkstück losgelassen wird.
Programmiere eine Operation
3.4 Füge das Drop-Event hinzu und simuliere
Fügen Sie ein Ereignis an der untersten Position der zweiten Operation hinzu, um das Werkstück freizugeben, und simulieren Sie dann das Endergebnis.
Drop-Event hinzufügen
4. Laden Sie das Programm herunter
4.1 Generiere und lade das Roboterprogramm herunter
Generiere das Programm zum Upload auf den Roboter-Controller.
Programm herunterladen
5. Rettet das Projekt
5.1 Speichere das Projekt mit einem passenden Namen
Speichern des Projekts