Automatische Linkpfadgenerierung
Aufbau
Das Automatic link path generation (ALG) erzeugt die Pfade zwischen zwei aufeinanderfolgenden programmierten Operationen. Um eine angemessene Lösung zu gewährleisten, müssen das Ende der Quelloperation und der Beginn der Zieloperation bereits kollisionsfrei und erreichbar sein.
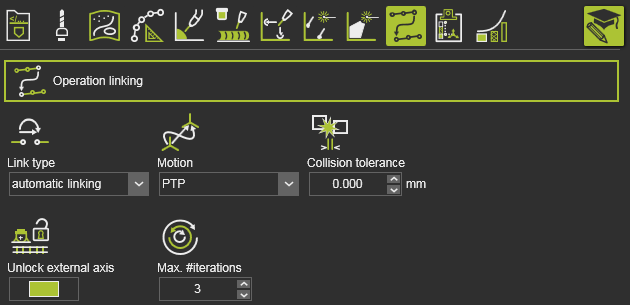
Bevor die automatische Pfadgenerierung durchgeführt werden kann, müssen die Linkpfadattribute entsprechend gesetzt werden. Dies kann im Programming defaults, vor der Programmierung der Operationen oder danach im Active program-Dashboard geschehen.
| Am relevantesten | |
|---|---|
| Linktyp | Um die automatische Erzeugung zu ermöglichen, muss der Typ auf automatische Verknüpfung eingestellt werden. 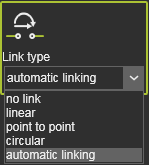 |
| Motion | Für robotische Szenarien: Verwenden Sie in allgemeinen Anwendungsfällen den Standard-PTP-Link-Bewegungstyp. Lineare Bewegung (LIN) kann ausfallen, wenn es Konfigurationsänderungen oder Drehungen gibt, die ohne eine PTP-Bewegung nicht gelöst werden können. |
| Kollisionstoleranz | Die Pfadoptimierung berücksichtigt keine Flyby-Bewegungseffekte. Also; während des Vorbeiflugs kann es immer noch zu einer Kollision kommen. Stellen Sie die Kollisionstoleranz auf einen höheren Wert als in der Simulation ein, um ein sichereres Ergebnis zu erzielen. Optimierung mit erhöhter Kollisionstoleranz berücksichtigt einen gewissen Sicherheitsabstand. Achte darauf, keine niedrigere Toleranz als den Wert in den Simulationseinstellungen zu definieren. |
| Erweiterte Einstellungen (im Expertenmodus angezeigt): | |
| Externe Achse entsperren | Deaktivieren Sie diese Option, um ALG etwas schneller laufen zu lassen und Pfade näher am Optimum zu erstellen. Beachten Sie, dass dies in einigen seltenen Fällen zu erfolglosen Ergebnissen führen kann. |
| Max. #iterations | Erhöhe den Wert, um bessere Verbindungspfade zu schaffen, und verringere ihn für schnellere Berechnungen. |
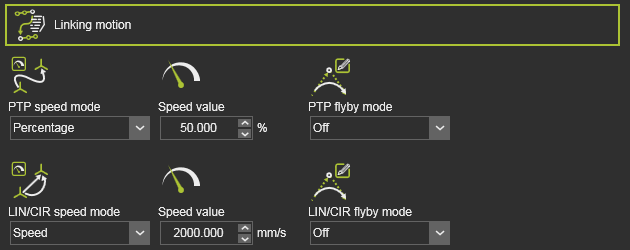
Dann spezifizieren Sie die Bewegungsattribute des Verbindungspfads, abhängig vom ausgewählten Verknüpfungstyp (PTP oder LIN).
Achten Sie auf die Annäherungs- und Rückziehoptionen der Operationen, zwischen denen der Verbindungspfad generiert wird.
Wenn die Zykluszeitoptimierung nicht im Fokus steht, sollten der erste Annäherungspunkt und der letzte Rückzugspunkt als flyby OFF Bewegungen definiert werden.
| Die Bewegung zum ersten Ansatz (der zweiten Operation) wird durch die Link-Bewegungsattribute selbst spezifiziert. Achte darauf, dass der Flyby-Modus hier auf AUS gestellt ist. | 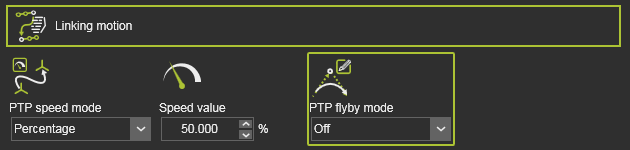 |
| Die Einstellung für die Bewegung zum letzten Rückzugspunkt (der ersten Operation) ist in den Rückzugsattributen dieser Operation angegeben. Stelle es auf Aus ein, um Kollisionsprobleme nach ALG aufgrund von Flyby-Effekten zu vermeiden, die bei der Linkpfadgenerierung nicht berücksichtigt werden können. | 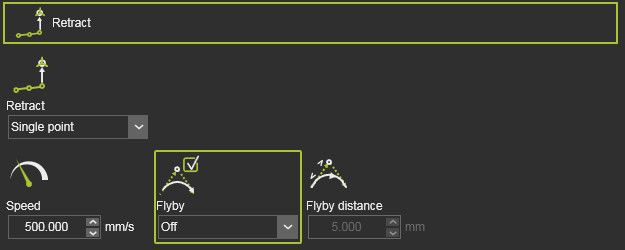 |
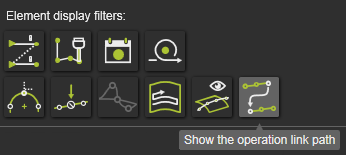
Um sicherzustellen, dass der Verknüpfungspfad im 3D-Werkzeugpfad angezeigt wird, überprüfen Sie, ob der entsprechende Werkzeugpfad-Anzeigefilter aktiviert wurde.
Durchführung der automatischen Linkpfadgenerierung
Der Linkpfad kann auf Programm-, Operationsgruppen- und Operationsebene ausgeführt werden. Und sobald es erstellt wurde, auch als eigenständige Entität im Flussdiagramm oder Toolpath-Dashboard.
Es wird jedoch empfohlen, die Erzeugung (immer) auszuführen, nachdem der Prozess-Toolpath optimiert wurde, entweder automatisch oder manuell.
Die Linkpfadgenerierung kann in Kombination mit der automatischen Prozesspfadoptimierung als zweiter Schritt des autonomen Programmierbefehls gestartet werden.
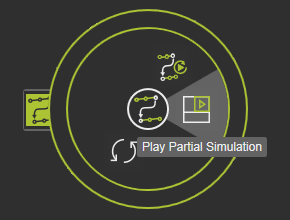
Oder es kann einzeln im Untermenü gestartet werden:
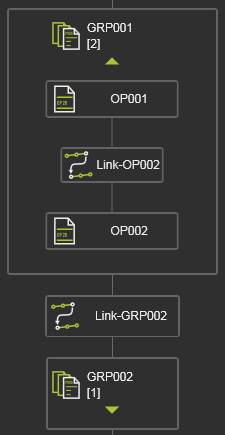
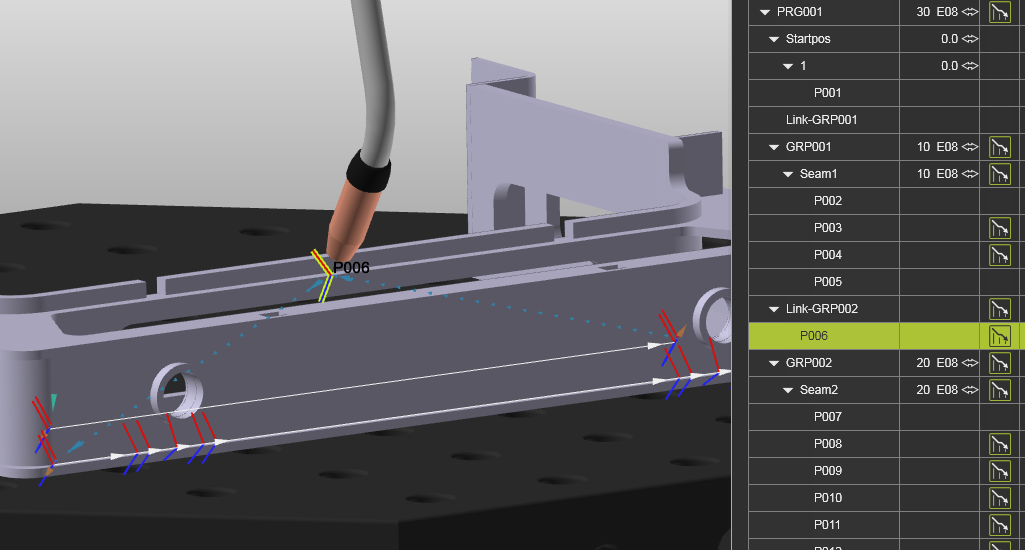
Der neue Operation Link-Pfad wird berechnet und das Ergebnis wird sofort im 3D view, im Flussdiagramm im Active program Dashboard und im Toolpath monitor Dashboard angezeigt.
| Jede Änderung an den Attributen des Operationslinks erfordert eine Neuberechnung. Dies geschieht nicht automatisch, sondern muss durch Neustarten des Befehls ausgelöst werden. |
Sobald der Verbindungspfad generiert wurde, kann er in der Simulation überprüft werden. Rechtsklick auf eine einzelne Linkpfad-Operation im Programmflussdiagramm, um die partielle Simulation nur auf diesem Linkpfad auszuführen.
Autonome Programmierung
Neben der Ausführung dieser autonomen Programmierfunktion an bestehenden Programmen, Operationsgruppen oder einzelnen Operationen können sie auch beim Programmieren einer neuen Operation ausgeführt werden.
Im Animationsfeld Prozessgeometrie und im Programmiereinstellungsfeld gibt es eine Option, um zu definieren, ob die autonome Programmierfunktion unmittelbar nach der Berechnung der Operation ausgeführt werden muss.
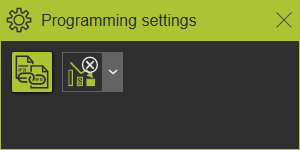
![]()
| Option | Beschreibung | |
|---|---|---|
| Keine Optimierung | Die Operation wird berechnet. Eine weitere autonome Optimierung wird nicht durchgeführt. | |
| Vollautonome Optimierung | Nachdem der anfängliche Werkzeugpfad berechnet wurde, werden alle autonomen Optimierungsmethoden ausgeführt. | |
| Automatische Prozesspfadoptimierung | Der sich befindliche Teil der Operation, der Werkzeugpfad, wird optimiert. | |
| Automatische Linkpfadgenerierung | Optimiere die Bewegung, die Verbindung zwischen den Operationen, um kollisionsfrei zu bewegen. |