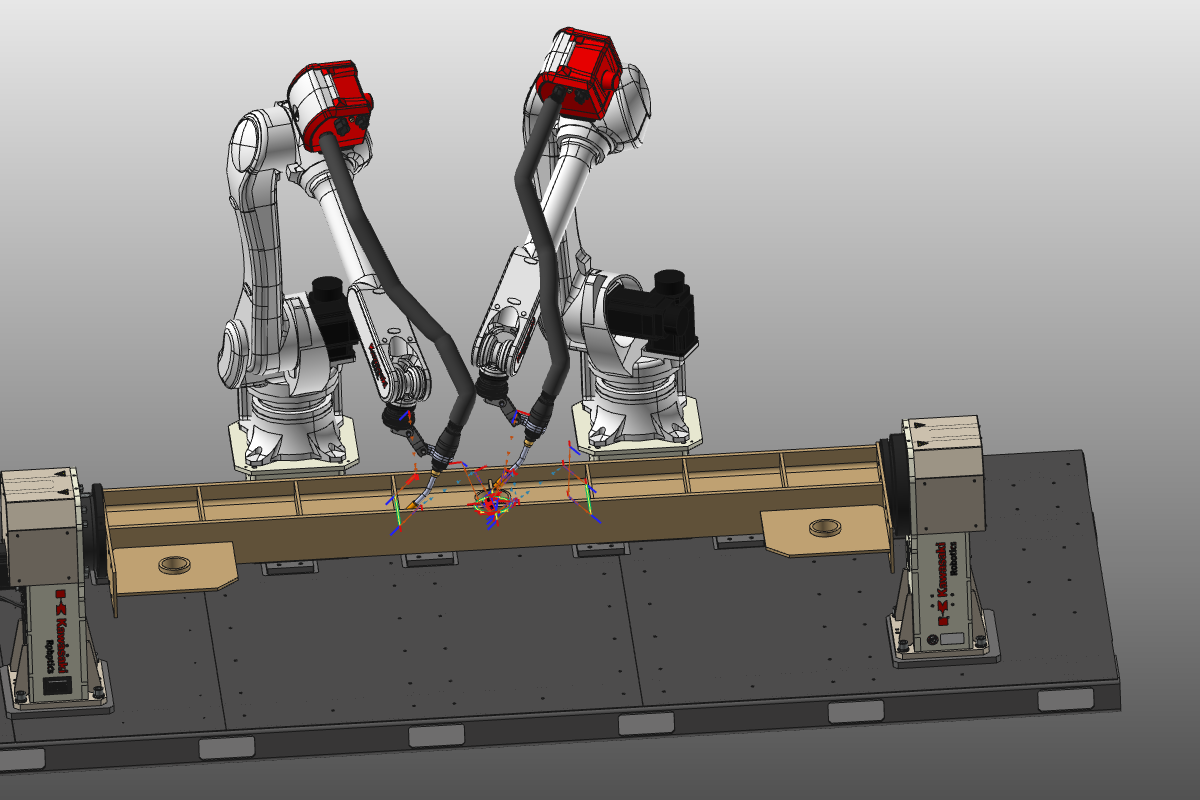
Programmierung mit mehreren Robotern
Zweck
Lerne, während du mehrere Roboter auf demselben Werkstück programmierst, zu überwachen.
Laden Sie das Projekt Arcwelding_BasicProgrammed.cendoc aus dem Projects-Ordner dieser Tutorial-Bibliothek.
Für diese Schulung wurden einige vereinfachte Schweißvorgänge so programmiert, dass dieses Einrichtung zu Konflikten und kritischen Situationen während der Simulation führt.
Schritte
1. Lehre mit gemeinsamen Werten
1.1 Positionierungsmodus auf Gelenkwerte setzen
Öffnen Sie die allgemeinen Einstellungen und überprüfen Sie im Offline-Programmierungscontainer, dass der Positioning-Modus in teach Einstellung auf Joint values gesetzt ist.
OLP-Einstellungen
1.2 Überprüfungsprogramme für beide Controller
Öffnen Sie das Programm-Dashboard und aktivieren Sie den Controller E01. Öffnen Sie dann das Dashboard des aktiven Programms und überprüfen Sie die Abläufe. Wechsle zum Controller E02 und stelle fest, dass das entsprechende Programm im Dashboard des aktiven Programms angezeigt wird. Überprüfen Sie auch deren Abläufe.
Schweißprogramm
1.3 Führe eine Simulation mit Kollisionsanalyse aus
Führe eine Simulation mit Kollisionsanalyse aus und überprüfe das Ergebnis.
Simulation
1.4 Lehre über gemeinsame Werte in Events und lehre
Wechsel zu Veranstaltungen und lehre. Beim Unterrichten über Gelenkwerte platziert der Regler den Werkzeugrahmen an der gewählten Werkzeugwegposition basierend auf den Gelenkwerten der Ressource (in diesem Fall des Roboters). Bei der Auswahl einer Werkzeugwegposition werden der entsprechende Regler und das Programm automatisch aktiviert. Beachten Sie, dass das andere Programm an seiner Heimatposition steht oder bleibt.
Lehre über gemeinsame Werte
2. Unterrichten Sie mit Simulation
Teach with Simulation ist eine Alternative zur oben genannten Situation. Anstatt die Ressourcen über die Gelenkwerte zu positionieren, um die gewünschte Position zu erreichen, wird im Voraus eine Simulation durchgeführt und die Position wird basierend auf dieser Simulation erreicht. Dies ermöglicht die Positionierung jeder anderen Ressource innerhalb desselben Simulationszeitraums.
2.1 Set positioNing-Modus zu Simulation
Öffnen Sie die allgemeinen Einstellungen und überprüfen Sie im Offline-Programmierungscontainer, dass Positioning Modus in teach auf Simulation gesetzt wurde. Im Hintergrund läuft eine Programmsimulation.
OLP-Einstellungen
2.2 Verwenden Sie das Teach-Panel für simulationsbasierten Unterricht
Wechsel zu Veranstaltungen und lehre. Dann öffne das Lehren-Panel. Die Möglichkeit, zwischen Joint Value Teach und Teach over Simulation zu wechseln, ist dort verfügbar.
Lehren über Simulation
2.3 Positionen auswählen und beide Roboter zur Simulation vergleichen
Wähle einige Positionen aus und bemerke, dass beide Roboter entsprechend ihrer Position zur Simulationszeit platziert sind.
Lehren über Simulation