Fanuc Lichtbogenschweiß-Downloader
Einführung
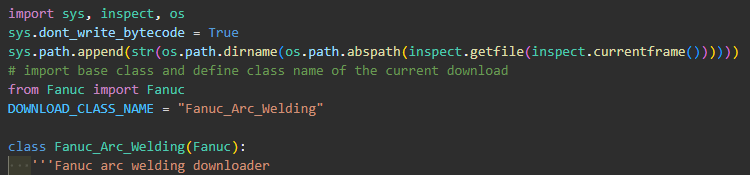
Der Fanuc-Bogenschweiß-Downloader ist vom Fanuc-Downloader abgeleitet.
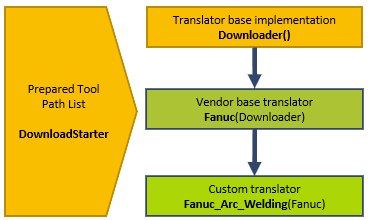
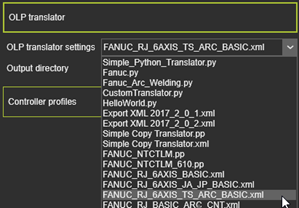
Sowohl der Fanuc- als auch der Fanuc-Lichtbogenschweißübersetzer werden mit der FASTSUITE Edition 2 Installation geliefert.
Der Fanuc-Bogenschweiß-Downloader ergänzt den Fanuc-Anbieter-Downloader durch eine technologiespezifische Implementierung. Neben Lichtbogen-Ein/Aus werden auch Kalibrierungsmethoden wie Berührungserkennung unterstützt. Nachfolgend finden Sie einen Überblick über die unterstützten Funktionen in diesem Fanuc-Bogenschweiß-Python-Downloader:
| Basis-Arc-Befehle wie Arc an/aus | Ja |
| Berührungserkennung in Richtung des Basisrahmens | Nein |
| Berührungserkennung in Oberflächenrichtung | Ja |
| Berührungserkennung mit Draht | Ja |
| Drahtprüfung auf Kontakt mit Draht | Nein |
| Berührungserkennung mit Düse | Nein |
| Nahtsuche in Oberflächenrichtung * | |
| Nahtfindung | Nein |
| Nahtverfolgung | Nein |
| Roboterteam/synchronisierte Mehrfachroboterbewegungen | Nein |
Sollte sein; entspricht der Berührungswahrnehmung, wurde jedoch nicht bewertet.
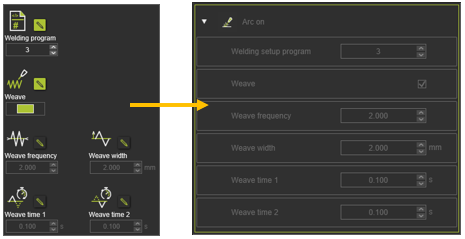
Bogen weiter
Zusätzlich zur Schweißprogrammnummer kann auch das Weben der Schweißpistole optional eingeschaltet werden. Während der Berechnung werden die Betriebsattribute auf das Ereignis übertragen (siehe Ereignisblattfeld am ersten Schweißpunkt).
Während der Nachbearbeitung werden die Ereignisattribute dann in die Robotersprache übersetzt.
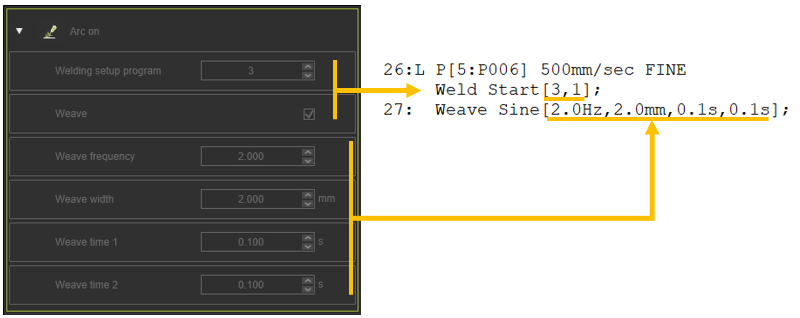
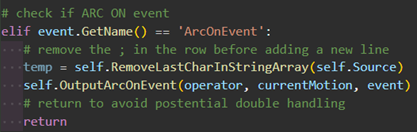
Der Handlungsbogen auf Ereignis wird in der HandleEvent()-Funktion verwaltet.
Bogen ab
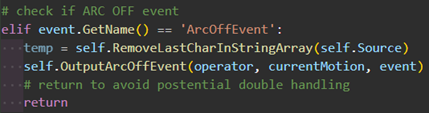
Der arc off-Befehl hat keine weiteren Attribute. Wenn das Weben eingeschaltet war, wird ein zusätzlicher Befehl gegeben, um das Weben auszuschalten.
Das Arc-off-Ereignis wird in der HandleEvent() Funktion verwaltet.
Berührungswahrnehmung
Touch-Sensing ist eine taktile Methode zur Kalibrierung einer Schweißnaht. Der Fanuc-Roboter bewegt sich von einer Ausgangsposition zum nominalen Kollisionspunkt. Wenn der Draht physischen Kontakt mit dem Teil aufnimmt, hält der Roboter den Offset zur nominalen Kollisionsposition und bestimmt sie.
Es gibt zwei Methoden, um die Berührungsbewegung zu definieren.
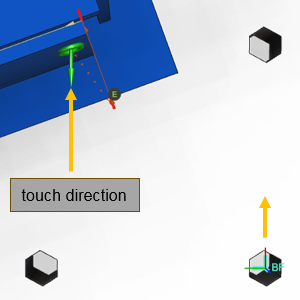 | 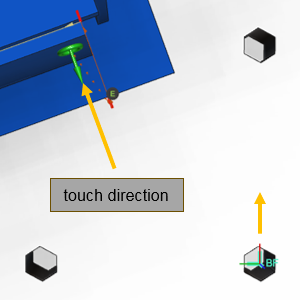 | |
| Berührung in Basisrahmen-Richtung | Berührung in Richtung normal zur Oberfläche |
Die Standard-Touch-Sensing von Fanuc unterstützt den Touch nur in Richtung des Basisframes. Diese Touch-Erkennung in Basisframe-Richtung ist im bereits vorhandenen Downloader FANUC_RJ_6AXIS_TS_ARC_BASIC.xml implementiert. Daher wird diese Touch-Steuerung im Fanuc Python-Downloader nicht verwaltet.
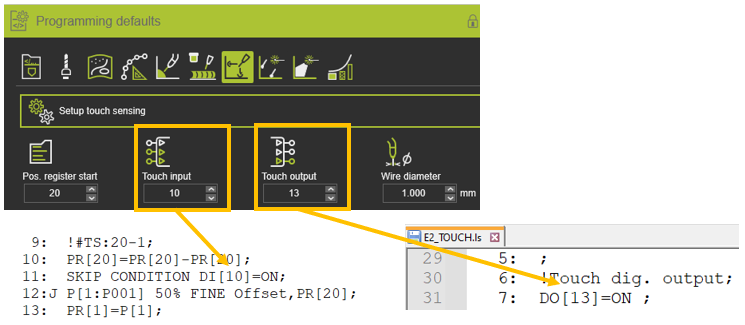
Touch-Zyklus-Ausgabe
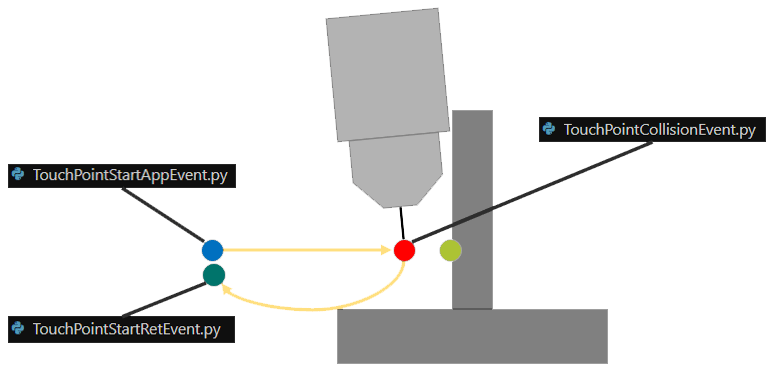
Der Berührungssensorzyklus besteht aus einem Referenzpunkt und Zykluspunkten. Der Referenzpunkt wird hier nur als “Halter” für die Zykluspunkte verwendet (normalerweise der Punkt direkt auf der Oberfläche). Die Berührungssensor-Zykluspunkte werden durch ein Ereignis erstellt und markiert. Dieses Ereignis wird automatisch im Hintergrund auf dem Referenzpunkt platziert. Das TouchSensingEvent wird in der Funktion HandleEvent() verwaltet.
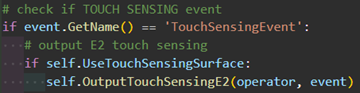
Für das Fanuc-Touch-Sensing-Event wurden nur der Startanflugpunkt, der Kollisionspunkt und der Startrückzugspunkt implementiert.

Stell den Kalibrierungsoffset für das Schweißen ein
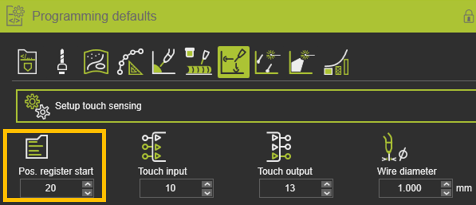
Der Offset jeder verbundenen Touch-Sensing-Sequenz wird in einem Positionsregister gespeichert. Die Positionsregisternummer ist dieselbe wie die Touch Connect ID-Nummer aus der programmierten Situation. Der Anfang der Nummerierung kann mit dem Attribut Pos. register start festgelegt werden.
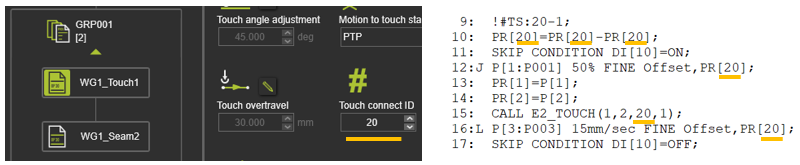
Während der Berechnung wird die Touch-Connect-ID automatisch erhöht und in den Touch-Betrieb geschrieben. Die Informationen über die Touch-Funktion werden an verschiedene Stellen im Roboterprogramm übertragen.
Das ConnectTouchProcessPoints-Event stellt die Verbindung zwischen dem Berührungssensor und der Schweißnaht her. Die Ereignisse werden automatisch auf die entsprechenden Werkzeugpfadelemente gemäß der Verbindungstyp-Einstellung angewendet und mit der entsprechenden Touch-Connect-ID versehen.
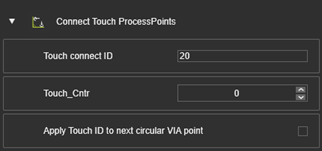
Dieses Ereignis wird dann vom Compiler in Robotercode übersetzt, bevor die Schweißnaht beginnt. Das Ereignis ConnectTouchTouchProcessPoints wird in der Funktion HandleEvent() verwaltet.

Konstanten und Einstellungen für zusätzliche Anpassungen
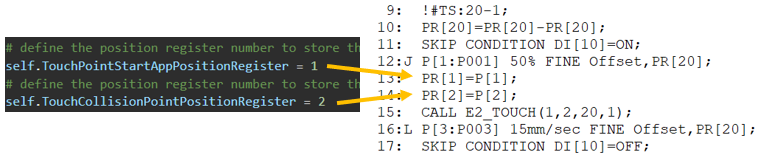
Positionsregister zum Speichern von Berührungssensorpunkten
Diese beiden Attribute können verwendet werden, um die Anzahl des Positionsregisters PR[x] zu definieren, in der Startpunkt und Kollisionspunkt zur Berechnung des Berührungsoffset im Makro gespeichert sind.
Berührungserkennungs-Makro-Name
Mit dem self.TouchSensingMacroName kann der Name des Makros angepasst werden.

Berührungssignale
Die Berührungssignale können entsprechend durch eine weitere Herleitung umkonfiguriert werden.
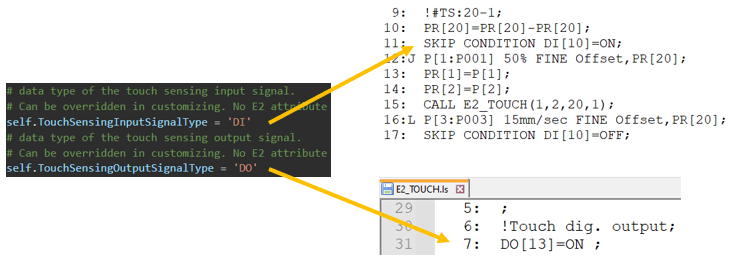
Die verwendete Nummer kann direkt innerhalb der FASTSUITE Edition 2Benutzeroberfläche konfiguriert werden.