4.1 - Programmer une opération à point unique# Programmer une opération à point unique
But
Programmez l’opération d’approche de l’appareil de nettoyage à l’aide de commandes d’apprentissage manuelles et de simulation.
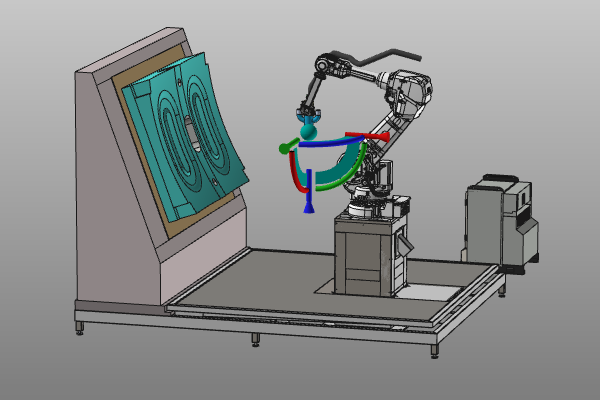
Les positions d’approche initiale sont insérées et affinées afin que la première opération puisse être simulée et validée.
Marches
1. Préparation
1.1 Passer à l’établi de programmation hors ligne
Passer à l’établi OLP
2. Installation des unités
2.1 Vérifier la technologie de pulvérisation du robot
Technologie des décors
2.2 Créer et placer un nouveau cadre de base
Créez un nouveau cadre de base sur le support de la pièce pour définir le point d’origine du programme.
Créer un cadre de base
2.3 Renommer le cadre de base
Renommer le cadre de base
2.4 Activez le cadre de base
Activez la trame de base
3. Programmer le parcours d’outil
3.1 Enseigner la première position à domicile
Créez la première position à domicile avec un simple leach. Un nouveau programme robotique est créé automatiquement.
Programmer une opération
3.2 Modifier ou insérer des positions
Sélectionnez le système d’axes des éléments du trajet d’outil et ajustez les positions. Le point est actif lorsque la sphère centrale du manipulateur devient bleue.
Ajouter ou modifier la position
3.3 Simuler l’opération
Simuler le programme
3.4 Supprimer la position inutiles
Points d’opération d’édition
3.5 Utiliser le panneau Teach pour les modifications de joints et de configuration
Les modifications dans le panneau Teach mettent à jour directement le parcours d’outil calculé.
Affiner les valeurs du parcours d’outil
4. Sauvez le projet
4.1 Sauvegarder le fichier projet
Projet de sauvegarde
Prochaine étape
-> [Programmez l’opération de surface] (./spraying-basics-step4-2)