Modify the welding path position posture
Purpose
Learn to modify the motion behavior and the posture at the welding path positions.
Use or load the project that has been saved in the chapter Building a simple Arc Welding project. Otherwise load the project Arcwelding_BasicProgrammed.cendoc from the Projects folder of this tutorial library.
Steps
1. Modify the posture
1.1 Change the motion type from PTP to Linear
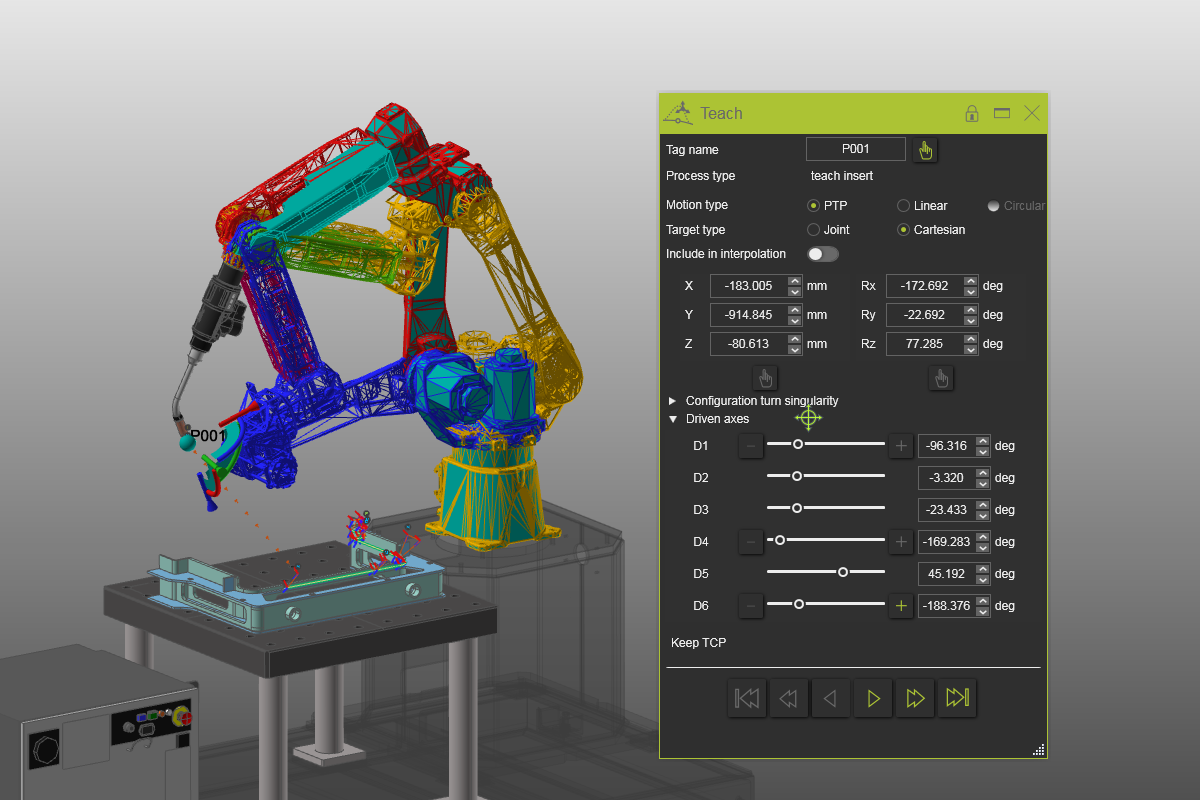
Run a partial simulation with trace and watch the motion. Open the Teach dashboard. Select a welding path position and change the motion type from PTP to Linear. This affects how the robot moves alongside the path towards the position. Replay the simulation to notice the difference. Several welding path positions with an operation have predefined motions and cannot be modified. Circular motions can only be created directly on the process geometry.
Motion type
1.2 Modify the driven axis values
In the dashboard, expand the Driven axis section. For example, modify the driven axis values to D1 = -65, D2 = 30, D3 = -25, and D5 = -65 degrees. Press Enter to confirm the changes.
Driven axis
1.3 Change the robot configuration in the dashboard
Expand the Configuration section and change the robot configuration. Sometimes a welding path position can be reached in more than one posture. The available configurations are shown in this section. By default, the robot configuration is set to the one with the least axis change compared to the previous posture.
Robot configuration
1.4 Preview available configurations with the manipulator
Double click on the manipulator center to highlight the different available configurations for this position. Change the welding path position to see the effect on the different configurations.
Robot configuration
1.5 Change the axis turn value
Click on the + (or -) sign on driven axis 4. This changes the turn. Some positions can be reached with an axis using different turn values. Play the simulation before and after to visualize the change.
Robot configuration