Générer les programmes de soudure à l’arc
But
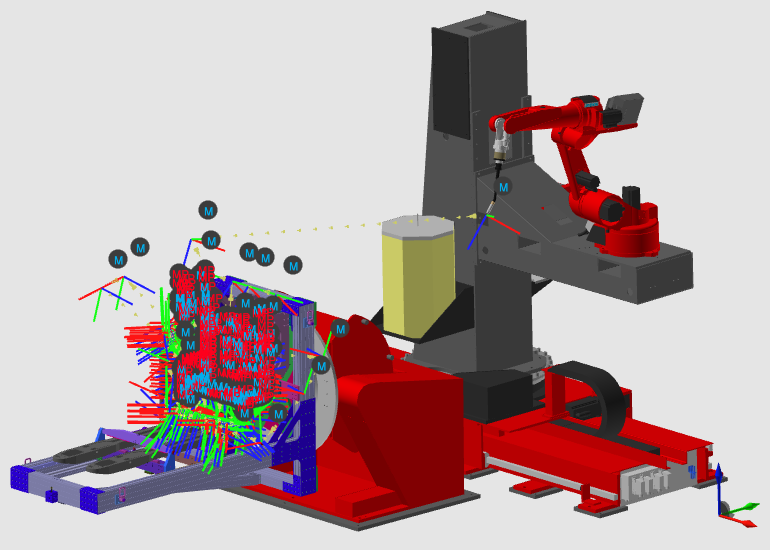
Après avoir configuré la cellule de travail avec les pièces à traiter, les programmes de soudure peuvent être générés, optimisés et simulés.
Marches
1. Préparation
1.1 Passer à l’établi de Programmation hors ligne s’il n’est pas déjà actif.
Passer à l’établi OLP
1.2 Vérifiez la configuration du projet avant de calculer les opérations.
Le cadre de l’outil doit être situé à l’extrémité du fil de remplissage. Le cadre de base du programme robotisé à Crown est généralement placé sur le dessus et au centre du positionneur actif de la pièce. Enfin, la technologie de soudure à l’arc doit être spécifiée.
Définir les paramètres par défaut des opérations
1.3 Définir les paramètres de soudure par défaut pour les nouvelles opérations.
Les paramètres par défaut typiques incluent l’angle de travail, l’angle de course et la vitesse de soudure. Vous pouvez toujours ajuster les paramètres plus tard sur chaque couture.
Définir les paramètres par défaut des opérations
2. Générer la géométrie du procédé
2.1 Créer la géométrie du procédé pour les joints de soudure si elle n’a pas été créée à l’étape 2.
Créer une géométrie de procédé
3. Calculer le trajet d’outil
Planifiez les groupes potentiels de joints de soudure.
Les critères pour regrouper initialement les coutures sont :
- Configuration similaire du positionneur attendu (pièce et robot).
- Mouvement continu du robot (configuration et virages).
- Directions de soudure similaires.
Ensuite, séquencez et organisez le parcours de l’outil programmé de manière intelligente pour réduire les mouvements inutiles des robots, traiter les coutures dans la même direction et orientation, ainsi que pour éviter un grand nombre de repositionnements du positionneur de la pièce.
3.1 Générez des trajectoires d’outil en attribuant une ou plusieurs coutures à chaque groupe d’opérations.
Répétez cela jusqu’à ce que toutes les coutures de soudure soient assignées.
Générer des trajectoires d’outils
3.2 Donner des noms clairs aux groupes d’opérations et aux opérations individuelles.
Structure du programme
4. Organiser les groupes d’opérations
4.1 Réordre les opérations à l’intérieur de chaque groupe pour un mouvement fluide du robot.
Structure du programme
5. Optimiser le groupe d’opérations
Vérifiez et optimisez la portée du groupe d’opérations unique et assurez-vous que tous les points de trajectoire de votre programme de soudure sont accessibles par rapport au robot de l’axe externe et au positionneur de pièces.
5.1 Déplacez les axes externes du robot près des positions de soudure souhaitées.
Commencez par déplacer l’axe extérieur du positionneur du robot (7, 8 et 9) vers les positions de soudage souhaitées.
Enseigner en externeAxes
5.2 Déplacez le positionneur de la pièce pour assurer la portée de chaque couture.
Ensuite, déplacez le positionneur de la pièce (10+11 ou 12+13) pour assurer la portée de chaque couture dans le groupe (le robot s’accroche au pistolet à souder). Cela ne s’applique pas si une couture de soudure nécessite un mouvement d’axe externe
Enseigner les axes externes
5.3 Réorganiser la séquence ou le contenu du groupe d’opérations lorsque nécessaire.
Réorganiser la séquence et/ou le contenu des groupes d’opérations selon les critères initiaux, si nécessaire.
Structure du programme
5.4 Passez en revue chaque opération et ajustez si nécessaire.
Choisissez chaque opération au sein du groupe. Modifiez selon l’activité ci-dessous si nécessaire et suivez étape en étape.
Structure du programme
5.5 Régler la configuration et les virages du robot, de préférence au début de chaque opération.
Enseigner la configuration des robots
5.6 Effectuez une simulation partielle pour valider les résultats actuels.
Lancer une simulation partielle
6. Optimiser les opérations individuelles
Optimisez les opérations individuelles. Évitez les collisions et obtenez des mouvements robotiques plus fluides et courts.
Modifier les points si nécessaire, mais minimiser le nombre d’éléments modifiés du trajet d’outil. Les éléments modifiés du parcours d’outil deviennent corrigés et ne sont plus affectés par les mises à jour des attributs technologiques.
6.1 Résoudre les collisions en ajustant l’angle de course au début ou à la fin de la couture.
Lorsqu’il y a une collision entre le canon de soudure et la pièce de soudure, modifiez l’angle de course au début et/ou à la fin de la couture.
Modifier la position du chemin de soudage
6.2 Utilisez l’interpolation par axe externe pour les longues coutures lorsque nécessaire.
Si nécessaire en raison de longs joints de soudure, utilisez l’interpolation par axe externe pour synchroniser ces axes avec le mouvement du robot.
Enseigner la configuration des robots
6.3 Exécutez une autre simulation partielle pour valider les mises à jour.
Jouez une simulation partielle pour valider le résultat jusqu’à présent
Lancer une simulation partielle
7. Vérifiez le parcours d’outil sans collision
Définissez un voyage sans collision entre opérations individuelles et entre les groupes d’opérations en insérant un chemin d’outil supplémentaire via des points.
7.1 Prolonger les mouvements d’approche en insérant des éléments de trajet d’outil avant des points existants.
Insérer les points avant
7.2 Prolonger les mouvements de rétraction en insérant des éléments de trajet d’outil après des points existants.
Insérer les points après
7.3 Ajouter un supplémentvia des points là où c’était nécessaire pour éviter les collisions de transition.
7.4 Effectuez une simulation partielle pour valider les transitions.
Lancer une simulation partielle
8. Simulation
8.1 Simulez le programme complet de soudure.
Exécutez la simulation complète
9. Optimiser le programme
Optimisez le programme en répétant les étapes précédentes, 4 à 8.
Prochaine étape
→ [Téléchargez les programmes OLP] (./raw-crown-1-step5)