Téléchargeur Yaskawa
Introduction
Le téléchargeur fournisseur Yaskawa traduit la fonctionnalité de base de FASTSUITE Edition 2 en un programme robotique Yaskawa prêt à l’emploi.
Préparation de la mise en page
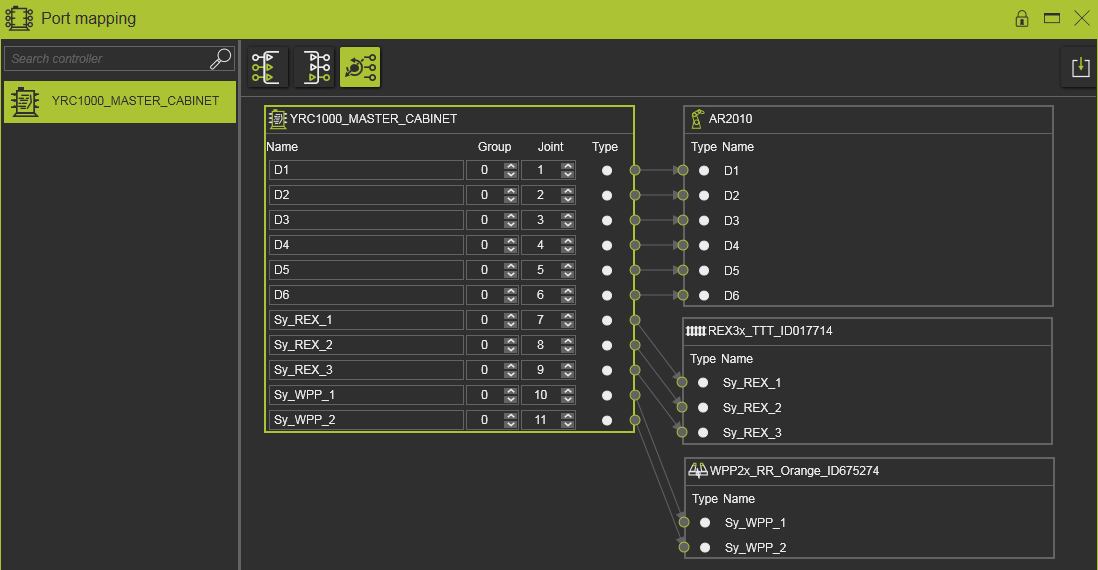
Les contrôleurs robots Yaskawa divisent les axes en différents groupes de mouvements. Chaque groupe peut avoir jusqu’à 4 joints de base (rails) et 12 joints de station (positionneur de pièce).
La configuration se fait dans le tableau de bord Port mapping dans Layout Builder Workbench, puis utilisée pour le téléchargement (et la connexion VRC).
Téléchargeur Yaskawa
Le téléchargeur Yaskawa prend en charge :
Cartographie d’outils et de base
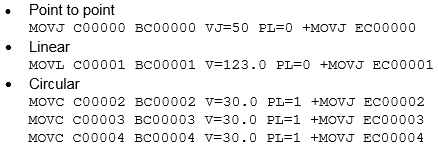
Point à point, sortie de mouvement linéaire et circulaire.
Cible de mouvement cartésienne (RECTAN) et articulaire (PULSE) pour tous les mouvements.
Épreuves de vitesse et de précision.
L’événement texte est utilisé pour ajouter un commentaire dans le programme robot Yaskawa.
Définir les événements de signal et attendre les événements de signal (ports logiques) ; Uniquement les signaux booléens.
Il comporte quelques restrictions :
Avec FASTSUITE Edition 2 version R2024.1, seul le téléchargeur (Python) est disponible. Pour créer un téléchargement, il faut utiliser l’application Custom Definition.
Implémentation via la personnalisation
Les mouvements multi-robots (synchronisés) sont pris en charge par défaut.
Les événements de port de ressources ne sont pas implémentés dans la base.
Infrastructures
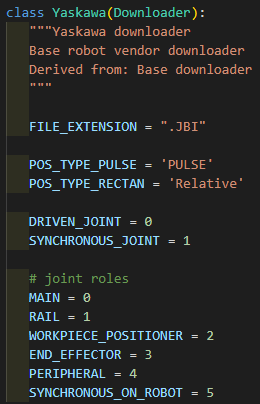
Le téléchargeur fournisseur Yaskawa est dérivé de l’implémentation de base du traducteur.
Pour faciliter la création du programme, le programme Yaskawa est organisé en plusieurs sections.
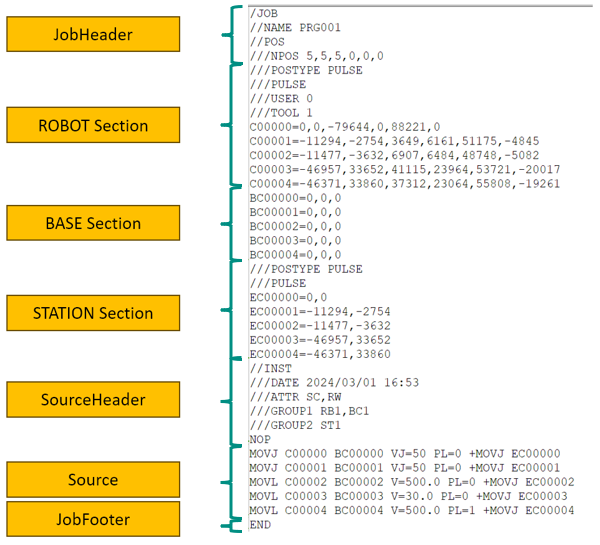
Ces sections sont organisées en réseaux de cordes. Les tableaux de chaînes sont initialisés dans la fonction __init__().
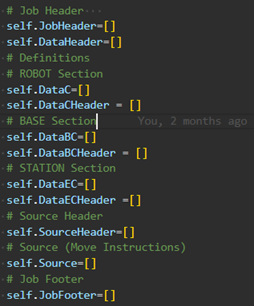
Le téléchargeur de base propose plusieurs méthodes pour ajouter du contenu aux tableaux, qui devraient être utilisées si possible.
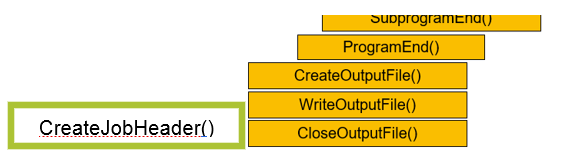
Sortie de l’en-tête
Le téléchargeur doit parcourir tout le programme pour rassembler toutes les données nécessaires de l’en-tête avant de construire l’en-tête. C’est crucial pour garantir que toutes les informations d’en-tête sont compilées. Après traitement des données, l’en-tête est créé en invoquant la méthode CreateJobHeader() dans la méthode CreateOutputFile().
Au lieu d’utiliser la méthode OutputHeader() de base, le téléchargeur Yaskawa opte pour une approche différente car OutputHeader() est exécutée avant le processus de boucle.
Mouvement de la poignée
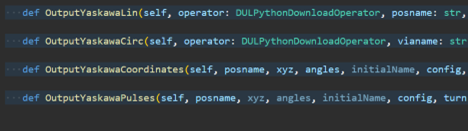
La fonction HandleMotion() est responsable de la gestion à la fois du mouvement lui-même et des événements qui se produisent avant et après le mouvement. Il utilise différents compteurs de positions pour suivre le nombre de sections différentes. Selon le type de mouvement, cette fonction invoque des méthodes spécifiques : OutputYaskawaPtp() pour le mouvement point à point, OutputYaskawaLin() pour le mouvement linéaire et OutputYaskawaCirc() pour le mouvement circulaire. De plus, il répond aux exigences uniques de Yaskawa pour les mouvements circulaires (CIRC), qui nécessitent la définition d’un point de départ, d’un point de passage et d’un point d’extrémité.
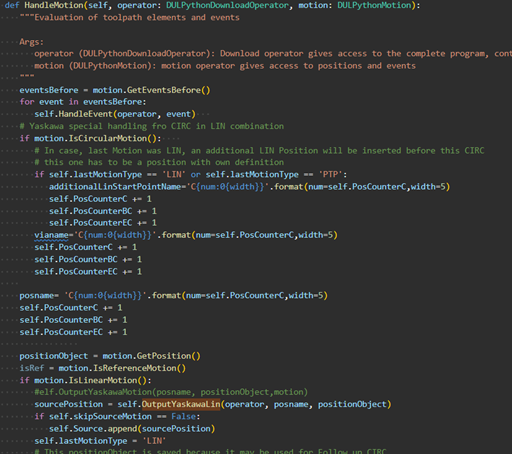
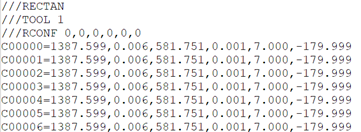
Chaque méthode OutputYaskawa…() sélectionne les sorties cartésiennes (RECTAN) ou axis (PULSE) en fonction du PosType, facilitant la génération appropriée de commandes de mouvement.
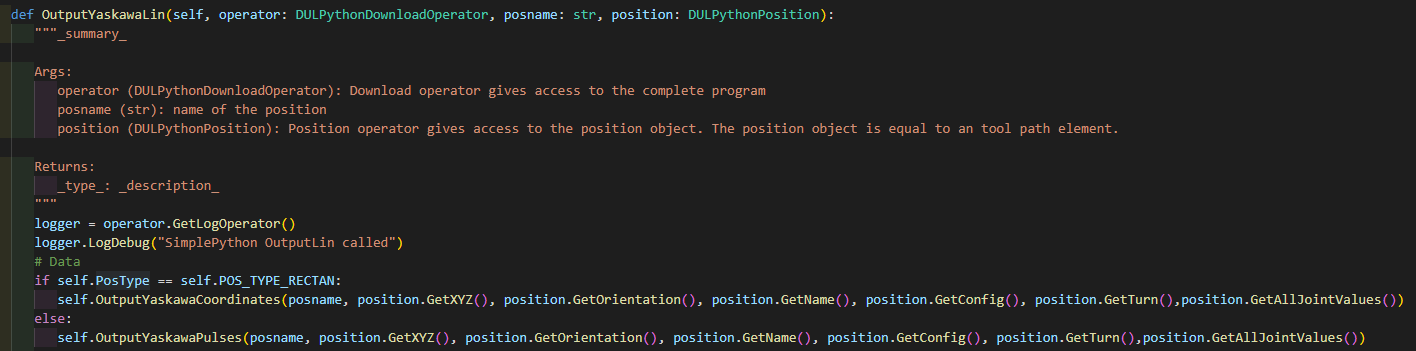
Le réglage par défaut appliqué :
![]()
Yaskawa Coordinate Output écrit des définitions pour des sections de données dédiées.
Condition : L’attribut Edition 2 robot CENOlpDataOutputStyle est défini à RECTAN, ce qui écrase ‘seSi. PosType ».
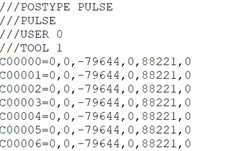
![]()
Partie DataC (Position du robot)
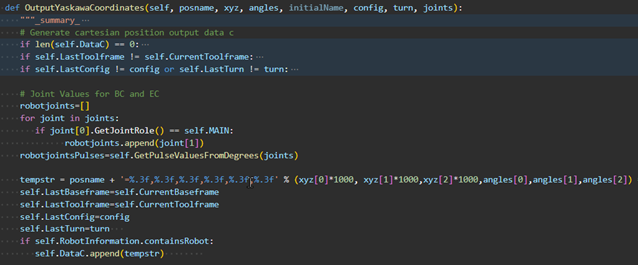
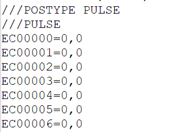
Yaskawa Pulse Output (par défaut) convertit les valeurs des axes en valeurs d’impulsion en utilisant les attributs Edition 2 chaîne robot CENOlpJointStepFactorValues et CENOlpJointZeroOffsetValues.
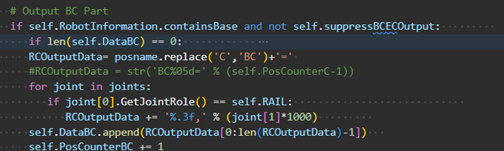
DataBC Part (Rail)
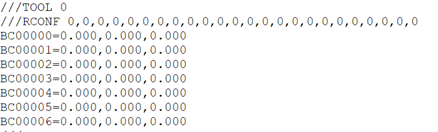
DataEC Part (Positionneur de pièces)
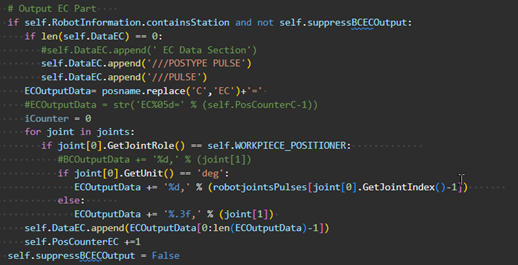
L’instruction de déplacement correspondante est ajoutée, selon le type de mouvement :
Gérer les événements
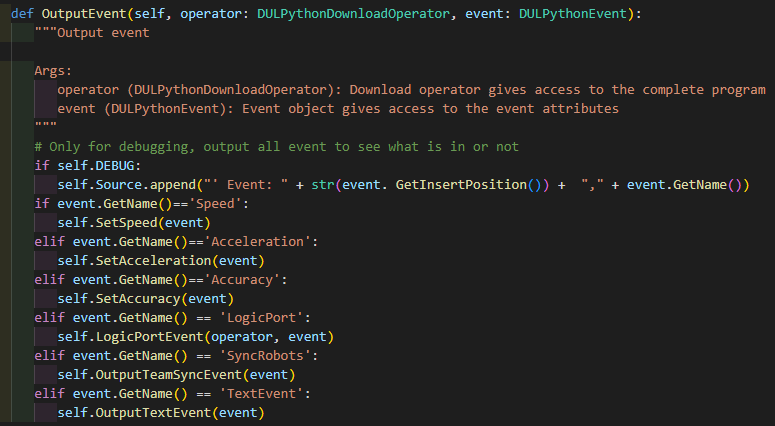
Le téléchargeur de base appelle la méthode HandleEvent() pour les événements intégrés et personnalisés. Par la suite, la méthode OutputEvent() est invoquée pour traiter l’événement qui a été appelé.
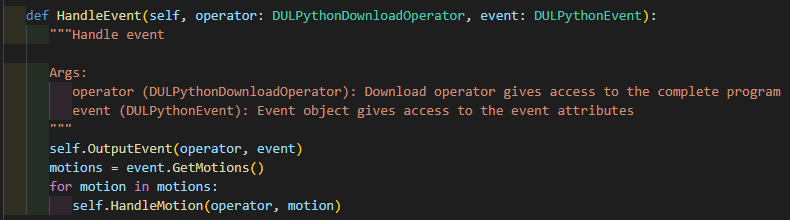
OutputEvent() analyse les événements et appels des fonctions pour définir la vitesse, la précision, l’accélération et les ports logiques.
Groupes de mouvement
Pour simplifier la sortie des coordonnées ponctuelles, les données FASTSUITE Edition 2 sont transférées dans une structure de données distincte avec des groupes de mouvement et des joints. Cette structure de données est la même que celle de Yaskawa. Cela facilite grandement la sortie. La définition des groupes de mouvement et des articulations se trouve à la fin du traducteur de Yaskawa.
Les fonctions assistantes suivantes préparent la sortie correcte pour différentes combinaisons de groupes de Yaskawa selon Edition 2 correspondance de groupes :

Constantes et réglages pour personnalisation supplémentaire
Constantes
Sous la définition de la classe, vous trouverez la définition de la constante.
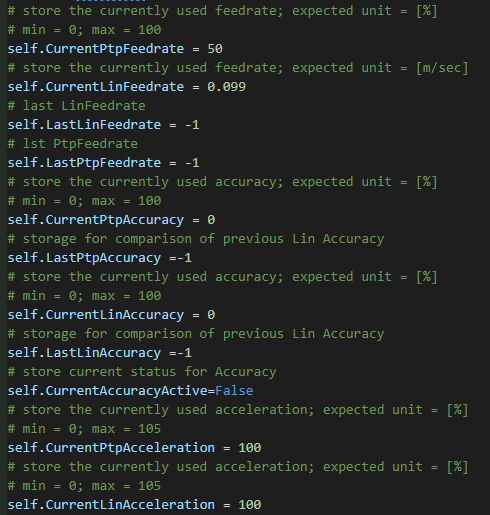
Vitesse, précision et accélération
Les profils de mouvement sont ajoutés à la définition du point, de sorte que les événements du profil de mouvement modifient les variables à l’échelle de la classe qui sont ensuite prises en compte dans la sortie du point.
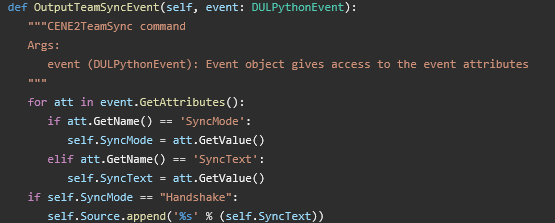
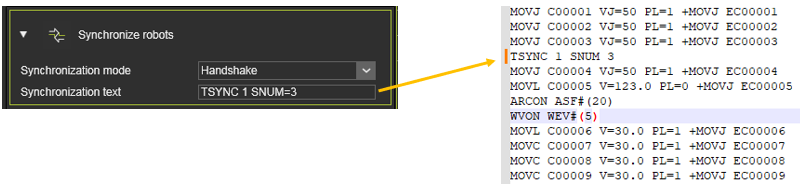
Événement SyncRobots
L’événement de base permet des poignées de main pour synchroniser les robots. L’événement doit être ajouté au maître et à l’esclave avec le mode Handshake et le texte synchronisé.