Set up the pick & place project
Purpose
Set up the pick and place project by building the shopfloor environment with the handling robot and required equipment, then load the workpiece as in the real production setup.
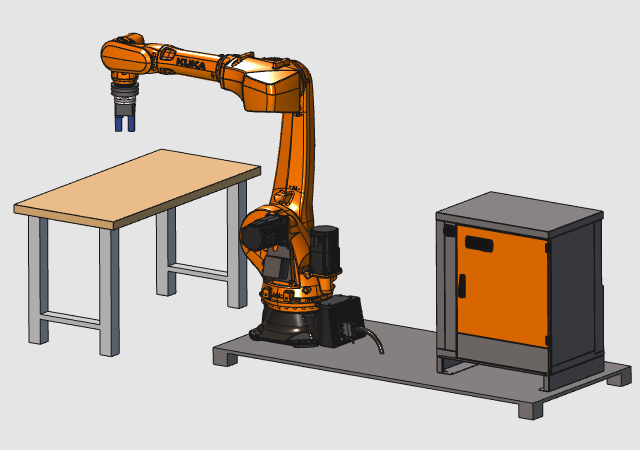
The layout is built from standard equipment such as the handling robot. Components are positioned and connected to complete the workcell, and the workpiece is then loaded onto the table.
Steps
1. Preparation (if needed)
Depending on the license package in use, you may work in either Layout Builder or Offline Programming for the setup sequence.
1.1 Switch to the Layout Builder workbench
Switch to LB workbench
1.2 Switch to the Offline Programming workbench
Switch to OLP workbench
1.3 Create a new empty document
Create a new empty document before building the workcell. If another document is open, choose whether to save it, close it without saving, or cancel.
Create a new document
2. Build the workcell
2.1 Switch to Drag & snap operation mode
When changing workbenches, Operation mode defaults to Normal. In Offline Programming, switch to Drag & snap to move components in the fixture assembly.
Set Drag & snap mode
2.2 Add components to the layout
Open the project structure and add the table, robot, adapter, pedestal, and controller from the training data.
Add to layout
2.3 Place components in the layout
Position components using adapters or explicit coordinates. The table should be at X=1800, Y=-950, and Z=0.
Place components
2.4 Load and mount the gripper
Load the previously created gripper and connect it to the robot.
Add and mount gripper
2.5 Build the electrical connection
Create the electrical connection between the controller and the robot.
Build electrical connection
3. Save the layout
3.1 Verify the workbench before saving
In Offline Programming, you cannot save a layout. Switch to the Layout Builder workbench before saving.
3.2 Save the layout
Save the layout document. It contains the shopfloor equipment, resources, and controllers.
Save layout
Next Step
-> Generate the pick & place program