Téléchargez le programme de soudure
But
Dans cette dernière page, nous allons créer un programme qui peut être envoyé et exécuté par la véritable station robotique.
L’établi Controller Builder sert à configurer le téléchargement ou la traduction du programme de l’OLP vers le code machine, ainsi que pour divers réglages de contrôleurs.
Marches
1. Exportez les programmes
1.1 Passer à l’établi Controller Builder.
Passer à l’établi CB
1.2 Configurez le traducteur OLP
Ouvre le tableau de bord du contrôleur. Dans le conteneur du traducteur OLP, vérifiez ou définissez le traducteur, pour cet exemple, sur FANUS_RJ_BASIC_ARC_CNT.xml. Le traducteur OLP est spécifique au fournisseur.
Réglez le traducteur
1.3 Définir le répertoire de sortie
Dans le même conteneur, spécifiez le chemin du répertoire de sortie où vous souhaitez télécharger le programme. Confirmez soit avec la touche Entrée, soit en cliquant quelque part en dehors du panneau.
Définir le répertoire de sortie
1.4 Renommer le programme
Changez vers l’établi OLP et ouvrez le tableau de bord Programmes. Cliquez sur le nom du programme pour le changer.
Renommer le programme
1.5 Télécharger le programme
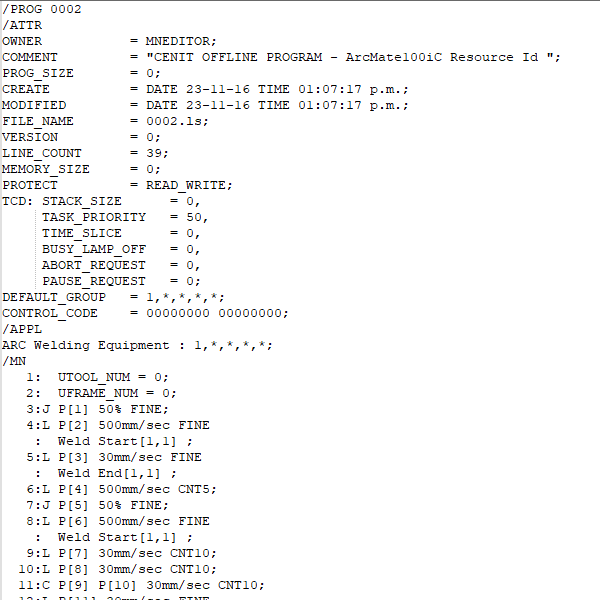
Appuyez sur le bouton de téléchargement OLP. Cela crée le programme spécifique au robot et le stocke à l’emplacement défini où vous pouvez l’ouvrir pour la révision.
Télécharger