#4 - Générer le programme pick & place# Générez le programme pick & place
But
Après avoir configuré la cellule de travail, générez un programme de pick and place de base pour la pièce.
Le tutoriel couvre les étapes principales pour créer des trajectoires d’outils pour le pick and place, simuler le résultat, télécharger le programme et sauvegarder le projet.
Marches
1. Préparation
1.1 Passer à l’établi de programmation hors ligne
Passer à l’établi OLP
2. Mise en place du projet
2.1 Ajoutez la pièce à travailler et la boîte à pièces
Ajoutez la pièce à travailler et la boîte à pièces au projet.
Ajouter au projet
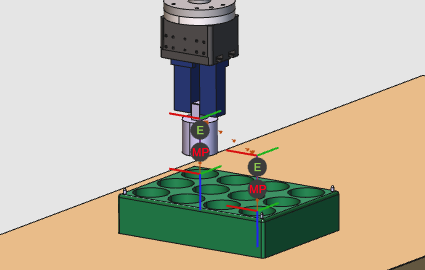
2.2 Mets le cylindre dans la boîte
Sélectionnez le mode Drag & snap pour placer le cylindre dans la boîte.
Composantes de position
2.3 Calibrez et posez la boîte sur la table
La boîte comporte trois broches de centrage pour l’étalonnage. Chargez le fichier des coordonnées mesurées depuis les données d’entraînement, calibrez la boîte sur la table, puis revenez en mode Drag & snap pour la positionner.
Calibrez la boîte
2.4 Vérifiez les paramètres technologiques
Vérifiez ou réglez la technologie et ses attributs.
Installez la technologie
3. Programme le robot
3.1 Créer la première opération (pick)
Créez la première opération où le robot attrape la pièce.
Programmer une opération
3.2 Ajouter l’événement de sélection
Simulez l’opération, puis ajoutez un événement à la position la plus basse pour attraper la pièce.
Ajouter l’événement de sélection
3.3 Créer la seconde opération (place)
Créer la seconde opération là où se trouve la piècelibéré.
Programmer une opération
3.4 Ajouter l’événement de drop et simuler
Ajoutez un événement à la position la plus basse de la seconde opération pour libérer la pièce, puis simulez le résultat final.
Ajout d’événement de chute
4. Téléchargez le programme
4.1 Générez et téléchargez le programme robot
Générez le programme pour le téléversement vers le robot contrôleur.
Programme de téléchargement
5. Sauvez le projet
5.1 Sauver le projet avec un nom approprié
Projet de sauvegarde