Construire un piédestal robotisé
But
Utilisez l’établi Resource Builder pour définir une ressource de piédestal robotique destinée au montage et au positionnement du robot dans la cellule de travail.
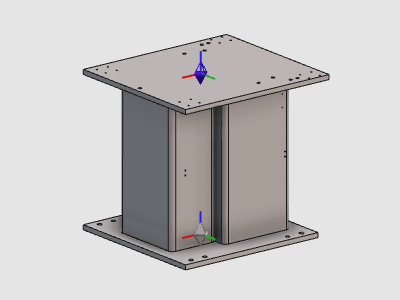
La ressource de piédestal est créée à partir de géométries importées, complétée avec un adaptateur, puis configurée avec les propriétés requises.
Marches
1. Préparation
1.1 Créer un nouveau document vide (si nécessaire)
Si un autre document est déjà ouvert dans la session en cours, créez un nouveau document vide. Si aucun document n’est ouvert, vous pouvez passer cette étape.
Créer un nouveau document
Ouvrez le menu Fichier et sélectionnez Nouveau. Si vous vous le demandez, choisissez de sauvegarder le document actuellement ouvert, de le fermer sans sauvegarder ou d’annuler.
1.2 Passer à l’établi Resource Builder
Passer au Resource Builder
2. Définir la ressource de piédestal
2.1 Géométrie du piédestal d’importation
Importez la géométrie du piédestal depuis l’ensemble de fichiers d’entraînement.
Géométrie d’importation
2.2 Créer la ressource des pièces de construction
Créez une nouvelle ressource de type pièces de construction pour la géométrie du piédestal importée.
Ressource pour créer des pièces de construction
3. Construire la forme de la ressource sur piédestal
3.1 Attacher la géométrie au cadre racine
Attachez la géométrie du piédestal importée au référentiel racine de la ressource.
Géométrie d’attache
4. Complétez la ressource sur le piédestal
4.1 Créez l’adaptateur de montage
Créez l’adaptateur sur la table de socle afin que le robot puisse être monté.
Créer un adaptateur
4.2 Configurer les propriétés des ressources
Définissez le nom de la ressource et complétez les propriétés restantes.
Configurer les propriétés des ressources
5. Sauvegarder et vérifier
5.1 Sauver la ressource du piédestal
Sauvegarder la ressource