Program the surface operation
Purpose
Create a surface cleaning operation and optimize the generated toolpath.
Different strategy and optimization methods are applied to improve track quality, process behavior, and download readiness.
Steps
1. Preparation (if needed)
1.1 Switch to the Offline Programming workbench
Switch to OLP workbench
2. Create the surface operation
2.1 Program the surface using Parallel plane strategy
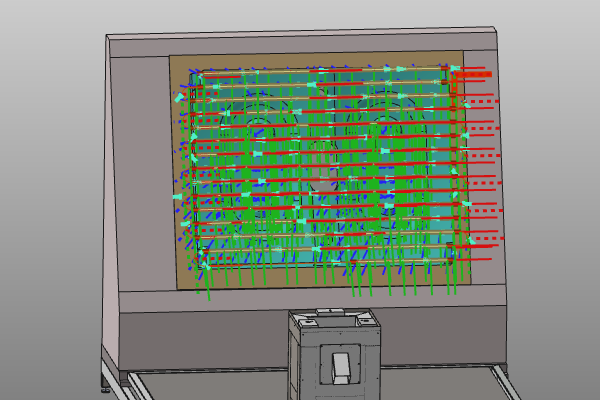
Use the Parallel plane track strategy to calculate the cleaning surface toolpath.
Program surface toolpath
2.2 Review alternative strategy results
Compare additional calculation strategies, then continue with the Parallel plane result for this tutorial.
Compare strategy results
3. Optimize the toolpath
3.1 Review toolpath density
Open the Toolpath dashboard and review the number of positions along the path.
Toolpath dashboard
3.2 Reduce points with approximation settings
Use Active program dashboard approximation attributes to reduce the number of positions.
Reduce toolpath points
4. Technology optimization
4.1 Adjust gun activation modes
Change gun activation modes and simulate to compare behavior.
Gun activation setup
4.2 Smooth movement with accuracy and speed
Edit Accuracy and Speed attributes to smooth robot movement.
Motion quality tuning
5. Track optimization
5.1 Rotate global track orientation
Track orientation
5.2 Adjust distance between tracks
5.3 Increase process area overrun
Extend process area to create global overrun. Use the edit icon to reset attributes to default values.
5.4 Extend or shorten in-process track sections
5.5 Add or remove tracks at beginning or end
5.6 Modify off-process movement between tracks
5.7 Define bridge behavior over gaps
6. Download the program
6.1 Generate the download package for the robot controller
Download program
7. Save the project
7.1 Save the project under an appropriate name
Save project