Rahmendefinitionen
Zweck
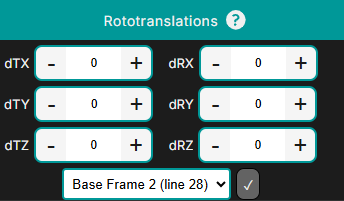
Frame-Definitionen bestimmen wie Transformationen im Rototranslation-Panel angewendet werden.
Jede Translation, Rotation oder kombinierte Rototranslation erfordert ein Pivot-Bezugssystem, das definiert:
- der Ursprung der Transformation
- das Koordinatensystem, das für Versätze verwendet wird
- die Pivot-Position, die vom Manipulator verwendet wird
Shopfloor Assistant unterstützt mehrere Rahmenbefehle, die zur Definition von Koordinatensystemen und Offsets innerhalb von NC-Programmen verwendet werden.
Diese Frames fungieren als Referenzsystem für alle Transformationen, die während des NC-Bearbeitens durchgeführt werden.
Unterstützte Frame-Typen
Die folgenden Frame-Anweisungen werden im NC-Editor unterstützt.
| Rahmen | Beschreibung |
|---|---|
| G93 | Referenzbasissystem |
| G94 | Zusätzlicher Offset-Rahmen |
| G113 / G114 / G96 | Dreipunkt-Rahmendefinition |
Diese Rahmenanweisungen definieren das aktive Koordinatensystem, das bei der Anwendung von Rototranslationen verwendet wird.
Bezugsrahmen
G93 — Referenzrahmen (Basisrahmen)
G93 definiert das primäre Bezugssystem des Programms.
Alle Bewegungen und Verschiebungen werden relativ zu diesem Rahmen interpretiert.
Merkmale
- Definiert eine Referenz relativ zur Maschine Null
- Alle Koordinaten werden relativ zum aktiven G93-Rahmen interpretiert
- Bei der rototranslationalen Verwendung bleibt der Pivotpunkt im Raum fest
G94 — Zusätzlicher Versatzrahmen
G94 definiert einen zusätzlichen Offset-Rahmen, der über dem aktiven Bezugssystem angewendet wird.
Es hebt den aktiven G93-Frame nicht auf, sondern fügt stattdessen eine inkrementelle Transformation hinzu.
Merkmale
- Bietet inkrementelle Versätze relativ zu G93
- Erlaubt das Stapeln mehrerer Offsets
- Nützlich für lokale Korrekturen oder Feinjustierungen
Modales Verhalten von G93 und G94
Sowohl G93 als auch G94 sind modale Befehle.
Sobald sie aktiviert sind, bleiben sie aktiv, bis:
- eine andere Frame-Instruktion überschreibt sie
- die Frame-Anweisung zurückgesetzt wird
Frameparameter sind optional – der Frame kann aktiv bleiben, ohne die Parameter explizit neu zu definieren.
Dreipunktrahmendefinitionen — G113 / G114 / G96
Diese Rahmenbefehle ermöglichen es, einen Koordinatenrahmen basierend auf Geometrie statt numerischer Verschiebungen zu definieren.
Der Rahmen wird mit zwei Gruppen von drei Punkten berechnet, die die Orientierung und Position des neuen Koordinatensystems definieren.
Merkmale
- Rahmen, definiert mit geometrischen Referenzpunkten
- Nützlich zur Ausrichtung von Werkzeugwegen an bestehende Geometrie
- Häufig beim Import oder Anpassen von Programmen verwendet
Verwendung von Frames im NC-Editor
Schritt 1 — Definiere das Bezugssystem (G93)
Setzen Sie die gewünschten G93-Ursprungswerte, um das Basiskoordinatensystem zu definieren.

Drücke Akzeptieren, um den Rahmen anzuwenden.
Der Offset wird als rototranslation mit der G93-Position als Pivot propagiert.
Schritt 2 — Zusätzliche Offsets anwenden (G94)
Definiere G94 Offset-Werte, um einen lokalen Offset relativ zum aktuellen Bezugssystem hinzuzufügen.

Drücke Akzeptieren, um den Offset anzuwenden.
Die Transformation wird relativ zum aktiven Bezugsrahmen berechnet.
Schritt 3 — Mehrere Verschiebungen stapeln
Mehrere G94-Offsets können nacheinander definiert werden.
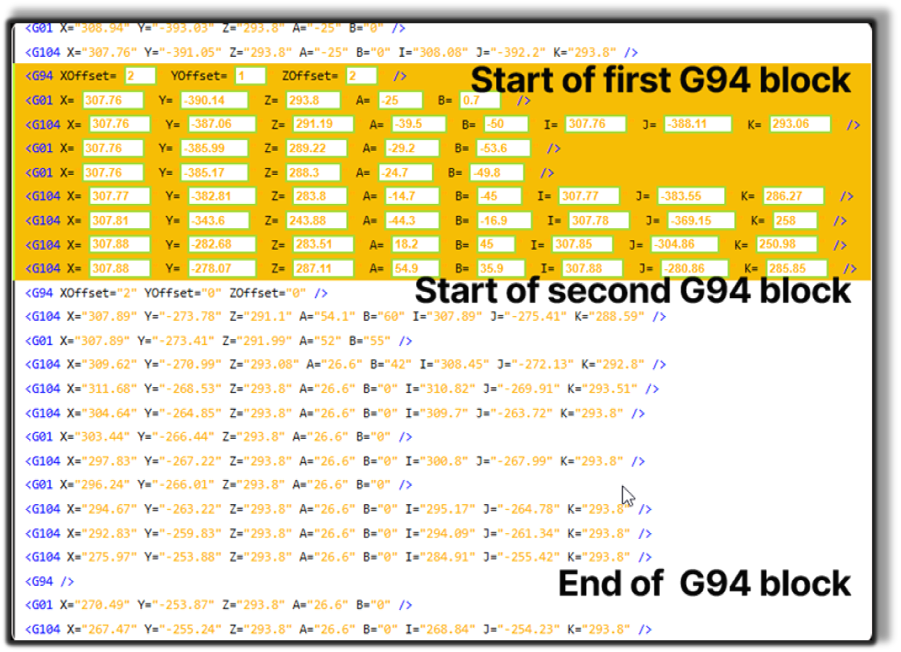
Jede neue G94 setzt sich aus dem vorherigen Offset-Rahmen fort.
Nur die Punkte innerhalb des G94-Abschnitts erhalten die zusätzliche Transformation.
Controller-spezifische Funktion (Sinumerik One)
Fahrzeugrahmen
Der Fahrzeugrahmen (VEHICLE_REF) definiert einen beweglichen Drehrahmen innerhalb des NC-Programms.
Sie kann als Pivot-Referenz für Rototranslationsoperationen verwendet werden.
Merkmale
- direkt im NC-Programm definiert
- relativ zum vorherigen G93- oder G113/G114-Rahmen
- als Pivot-Referenz verwendbar
- ändert nicht die ursprünglichen Punktkoordinaten
Schritt 1 — Stellen Sie die VEHICLE_REF Werte ein
Der Rahmen wird innerhalb des NC-Programms definiert und relativ zum vorherigen Bezugssystem angewendet.

Schritt 2 — Druck auf Annehmen
Der Fahrzeugrahmen kann jetzt als Drehpunkt im rototranslationalen Arbeitsablauf verwendet werden.
Controller-Anmerkung
Der Fahrzeugrahmen (VEHICLE_REF) ist nur für Sinumerik-Controller erhältlich.
Notizen für Bediener
- Der aktive Rahmen definiert den Pivot, der vom Rototranslationspanel verwendet wird.
- G93 / G96 verhalten sich als stabile Bezugsrahmen.
- G94 bietet inkrementelle lokale Verschiebungen, die für kleine Korrekturen nützlich sind.
- Frame-Befehle sind modal und bleiben aktiv, bis sie überschrieben werden.
- Überprüfen Sie immer Frame-Transformationen im 3D-Viewer, bevor Sie weitere Bearbeitungen vornehmen.