Définitions des cadres
But
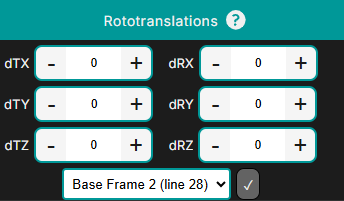
Les définitions de trame déterminent comment les transformations sont appliquées dans le panneau de rototraduction.
Chaque translation, rotation ou rototranslation combinée nécessite un référentiel pivot qui définit :
- l’origine de la transformation
- le système de coordonnées utilisé pour les décalages
- le emplacement du pivot utilisé par le manipulateur
Shopfloor Assistant prend en charge plusieurs instructions de trame utilisées pour définir des systèmes de coordonnées et des décalages au sein des programmes NC.
Ces images servent de système de référence pour toutes les transformations effectuées lors du montage NC.
Types de châssis pris en charge
Les instructions de trame suivantes sont prises en charge dans l’éditeur NC.
| Cadre | Description |
|---|---|
| G93 | Cadre de référence |
| G94 | Cadre décalé supplémentaire |
| G113 / G114 / G96 | Définition du référentiel à trois points |
Ces instructions de repère définissent le système de coordonnées active utilisé lors de l’application des rototranslations.
Référentiels
G93 — Référentiel (Cadre de base)
G93 définit le référentiel principal du programme.
Tous les mouvements et décalages sont interprétés en fonction de ce référentiel.
Caractéristiques
- Définit une référence relative à zéro de la machine
- Toutes les coordonnées sont interprétées par rapport au référentiel actif G93
- Lorsqu’utilisé en rototranslation, le point pivot reste fixe dans l’espace
G94 — Cadre décalé supplémentaire
G94 définit un référentiel décalé supplémentaire qui est appliqué au-dessus du référentiel actif.
Il n’annule pas la trame active G93, mais ajoute plutôt une transformation progressive.
Caractéristiques
- Fournit décalages incrémentaux par rapport à G93
- Permet empiler plusieurs décalages
- Utile pour corrections locales ou ajustements fins
Comportement modal de G93 et G94
G93 et G94 sont toutes deux des commandes modales.
Une fois activés, ils restent actifs jusqu’à ce que :
- une autre instruction de trame les supprime
- l’instruction de trame est réinitialisée
Les paramètres de trame sont optionnels — la trame peut rester active sans redéfinir explicitement les paramètres.
Définitions de cadres à trois points — G113 / G114 / G96
Ces commandes de trame permettent de définir un référentiel de coordonnées basé sur la géométrie plutôt que sur des décalages numériques.
Le référentiel est calculé à l’aide de deux groupes de trois points, définissant l’orientation et la position du nouveau système de coordonnées.
Caractéristiques
- Cadre défini à l’aide de points de référence géométriques
- Utile pour aligner les trajectoires d’outil à la géométrie existante
- Souvent utilisé lors de l’importation ou de l’adaptation de programmes
Utilisation des images dans l’éditeur NC
Étape 1 — Définir le référentiel (G93)
Définissez les valeurs d’origine G93 souhaitées pour définir le référentiel de coordonnées de base.

Appuyez sur Accept pour appliquer le cadre.
Le décalage est propagé sous forme de rototranslation utilisant la position G93 comme pivot.
Étape 2 — Appliquer des décalages supplémentaires (G94)
Définissez valeurs de décalage G94 pour ajouter un décalage local par rapport au référentiel courant.

Appuyez sur Accepter pour appliquer le décalage.
La transformation est calculée par rapport au référentiel actif.
Étape 3 — Empiler plusieurs décalages
Plusieurs décalages G94 peuvent être définis séquentiellement.
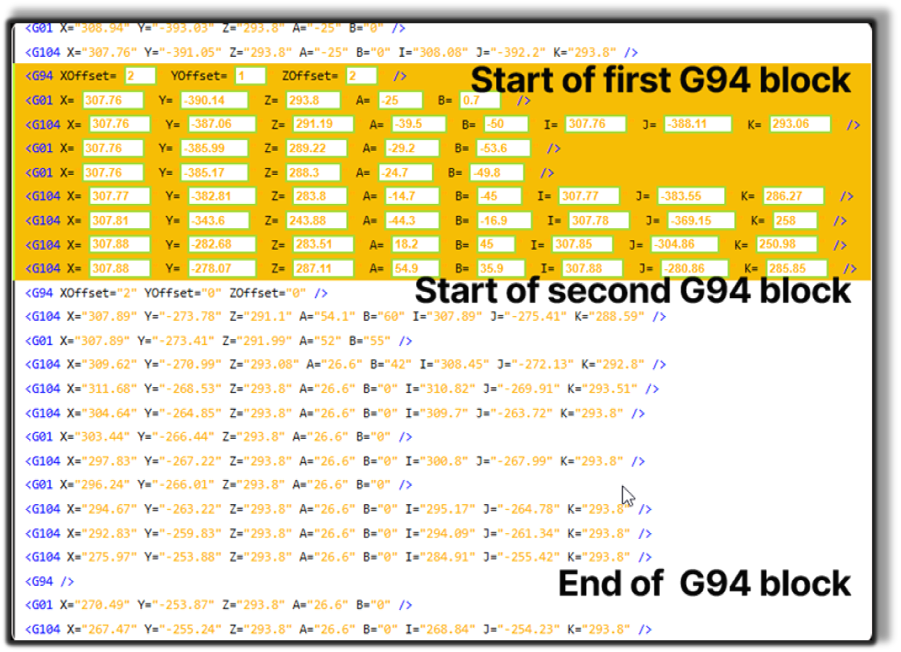
Chaque nouveau G94 continue depuis le cadre décalé précédent.
Seuls les points à l’intérieur de la section G94 reçoivent la transformation supplémentaire.
Fonctionnalité spécifique à la manette (Sinumerik One)
Châssis du véhicule
Le Vehicle Frame (VEHICLE_REF) définit un pivot mobile à l’intérieur du programme NC.
Il peut être utilisé comme référence pivot pour les opérations de rototranslation.
Caractéristiques
- défini directement dans le programme NC
- par rapport à l’ancienne image G93 ou G113/G114
- utilisable comme référence pivot
- ne modifie pas les coordonnées ponctuelles originales
Étape 1 — Définir les valeurs de VEHICLE_REF
Le référentiel est défini à l’intérieur du programme NC et appliqué par rapport au référentiel précédent.

Étape 2 — Appuie sur Accepter
Le Vehicle Frame peut désormais être utilisé comme un point pivot dans le flux de travail de rototranslation.
Note sur la manette
Le Vehicle Frame (VEHICLE_REF) est disponible uniquement pour les contrôleurs Sinumerik.
Notes pour les opérateurs
- Le référentiel actif définit le pivot utilisé par le panneau de rototraduction.
- G93 / G96 se comportent comme des référentiels stables.
- G94 fournit décalages locaux incrémentaux utiles pour de petites corrections.
- Les commandes de trame sont modales et restent actives jusqu’à ce qu’elles soient remplacées.
- Vérifier toujours les transformations d’images dans le Visualiseur 3D avant d’appliquer d’autres modifications.